

Obstacle detection system and method based on depth information
A technology of obstacle detection and depth information, applied in the field of depth information obstacle detection system, can solve the problems of long detection time and complicated acquisition of depth map information, achieve effective detection, improve effectiveness and real-time performance, and reduce impact.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The technical solutions in the embodiments of the present invention will be described clearly and in detail below in conjunction with the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0041] The technical scheme that the present invention solves the problems of the technologies described above is:
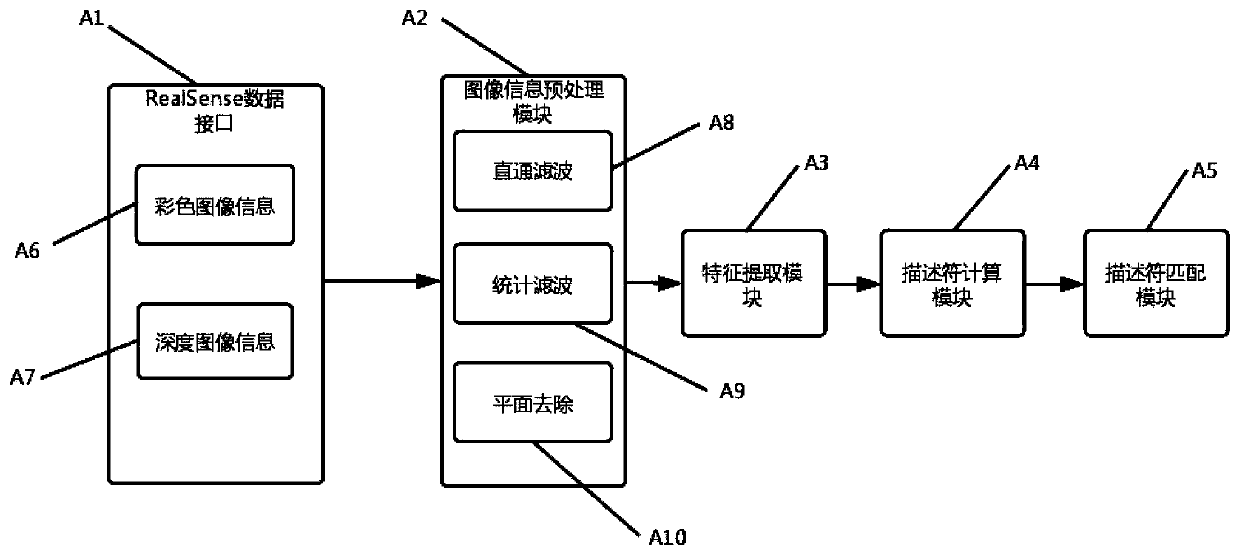
[0042] An obstacle detection system based on depth information is characterized in that it includes: a data interface module, an image information preprocessing module, an obstacle information feature extraction module, a descriptor calculation module and a descriptor matching module. Wherein, the data interface module includes a color information interface component and a depth information interface component, the color information interface is used to obtain the color image information of the environment from the data acquisition device, and the depth information interface component is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More