

Multi-motion-mode movable parallel mechanism and control method thereof
A technology with multiple motion modes and control methods, applied in the field of mobile parallel mechanisms with multiple motion modes and its control, can solve problems such as complex control, poor stability, and insufficient precision, and achieve broad application prospects, good bearing capacity, and avoid limitations Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The specific implementation manner of the present invention will be described in detail below in conjunction with the accompanying drawings and preferred embodiments.
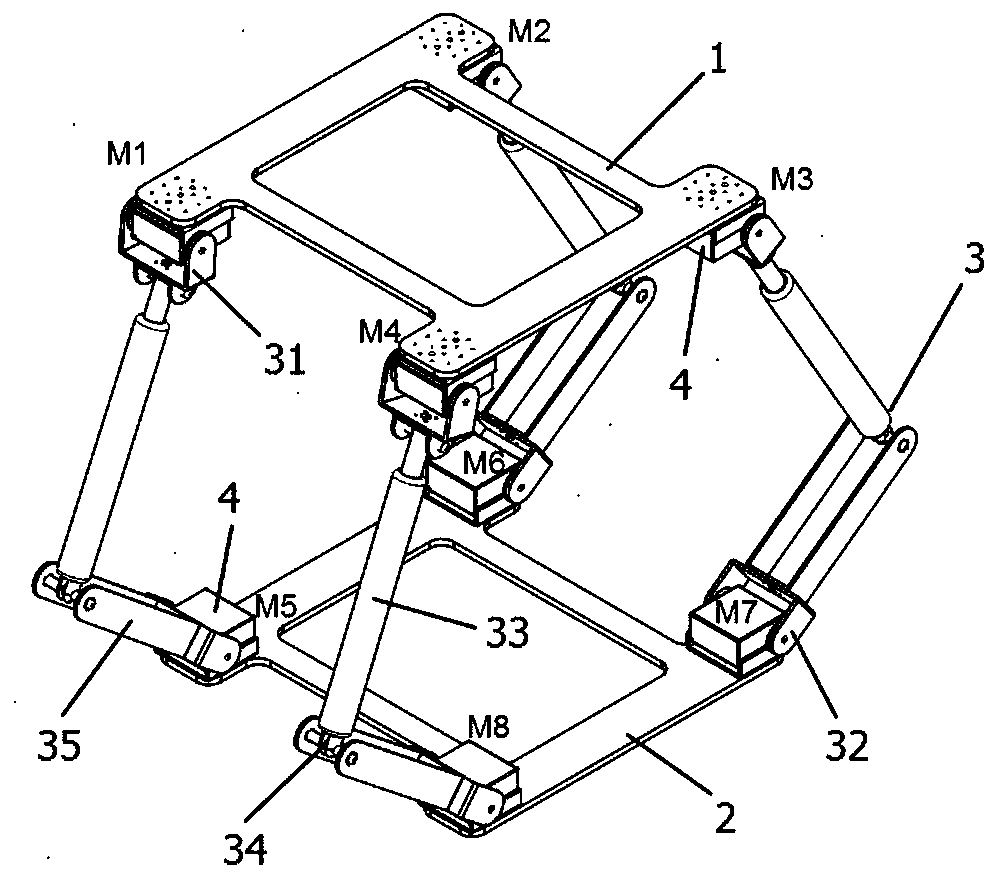
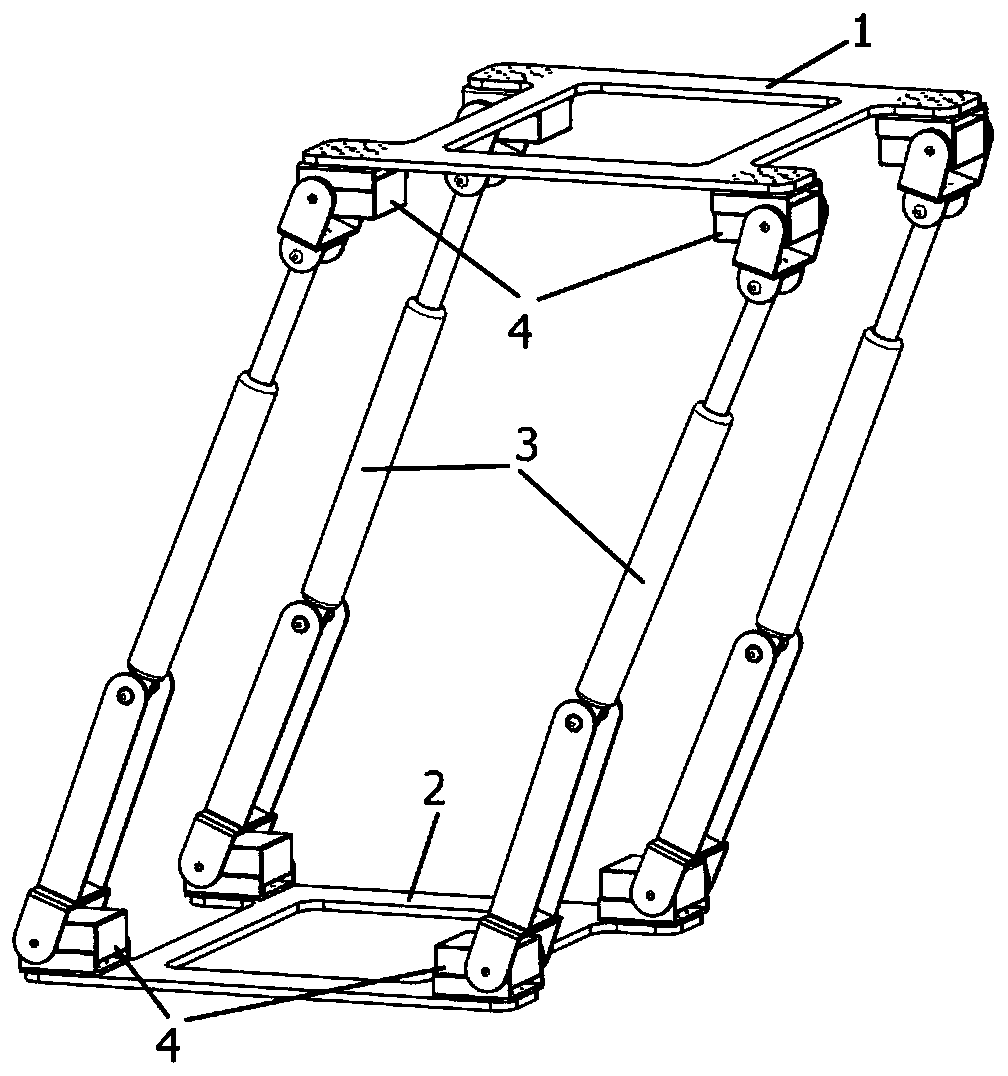
[0048] Such as figure 1 with 2 As shown, the present invention provides a mobile parallel mechanism with multiple motion modes, including an upper platform 1 and a lower platform 2 with a parallelogram structure, the upper platform 1 and the lower platform 2 are arranged in parallel, and a plurality of supports are arranged between the two. Chain 3, a plurality of branch chains 3 are arranged parallel to each other, including three rotating pairs and a moving pair, the head and tail ends of which are connected with the upper platform 1 and the lower platform 2 through the steering gear 4, and the axial centerlines of the rotating shafts of all rotating pairs They are all parallel to each other and to the same side of the upper platform 1 or the lower platform 2 .
[0049] The steering gear 4 is provide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More