

A split-and-hanging wire-type walking clamping mechanism for transmission line inspection robots
A technology for inspection robots and power transmission lines, which is applied in the directions of overhead lines/cable equipment, manipulators, manufacturing tools, etc., can solve the problems of lateral offset distance and complex obstacle-crossing methods of line inspection robots, and achieves reduction of lateral offset distance, The effect of simplifying the way of crossing obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
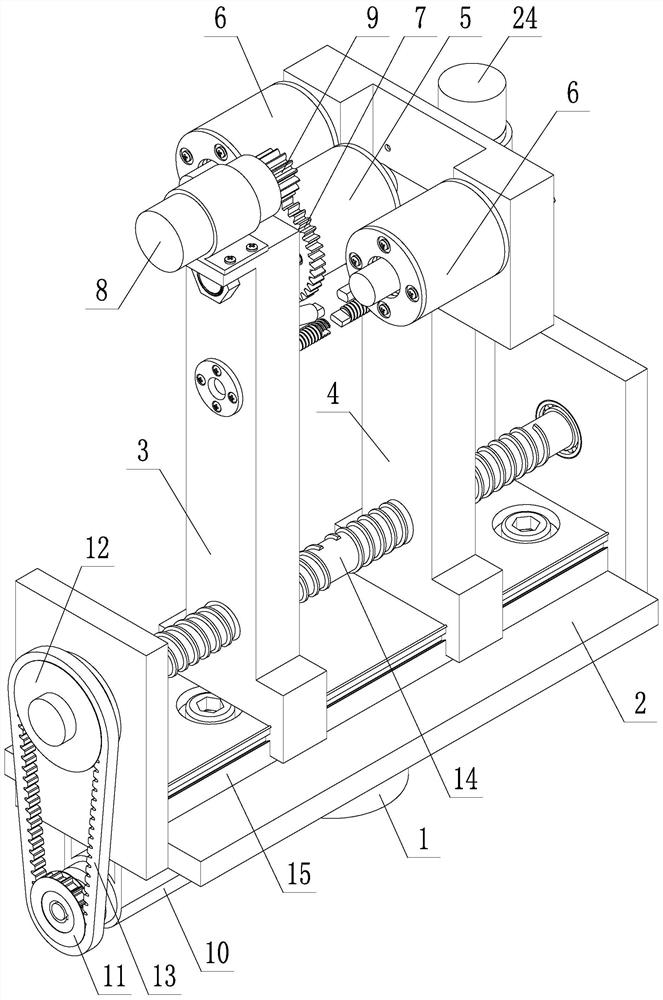
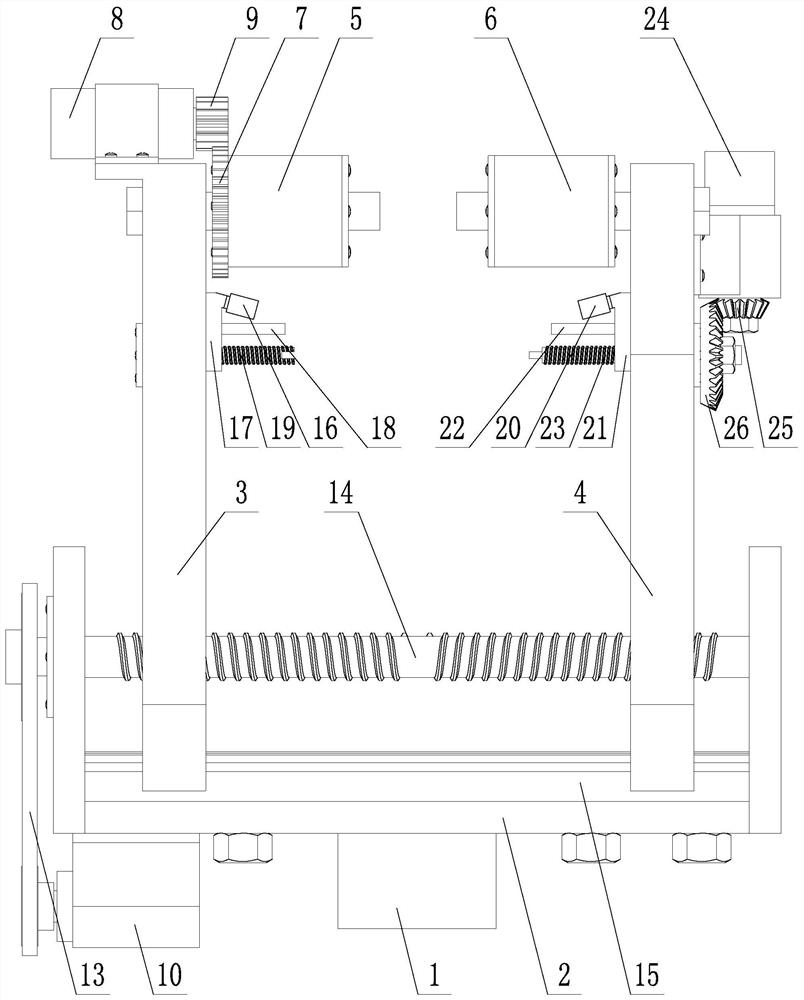
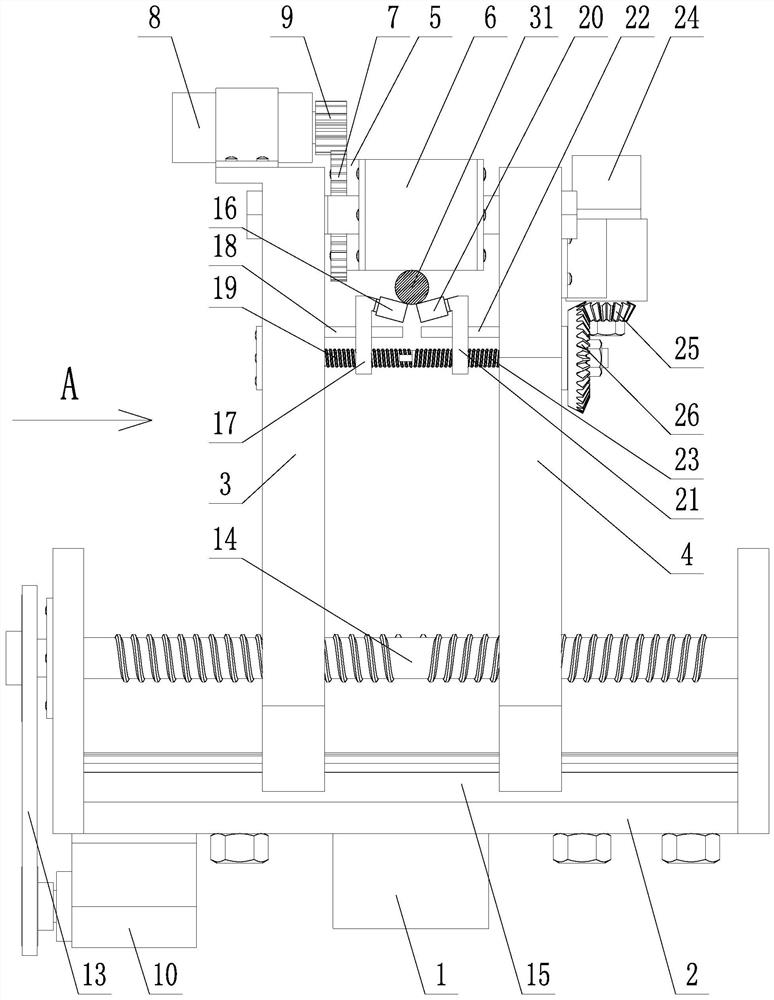
[0020] like Figures 1 to 6 As shown in the figure, a split-line-type walking and clamping mechanism for a power transmission line inspection robot includes an arm joint 1, a base 2, a first pillar 3, a second pillar 4, an active traveling wheel 5 and a driven traveling wheel 6; The arm joint 1 is fixedly mounted on the bottom of the base 2, and the first pillar 3 and the second pillar 4 are vertically installed on the base 2; A driven gear 7 is fixed on the wheel 5; a walking drive motor 8 is arranged on the top of the first support 3, and a driving gear 9 is installed on the motor shaft of the walking driving motor 8, and the driving gear 9 is in phase with the driven gear 7. Meshing; the number of the driven running wheels 6 is two, the two driven running wheels 6 are horizontally installed on the upper end of the second pillar 4 , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More