

Rigidity variable robot towards minimally invasive surgery and working method
A minimally invasive surgery and variable stiffness technology, applied in the field of medical devices, can solve the problems of lack of high rigidity, positioning accuracy, and weak load bearing capacity, and achieve the effects of reducing labor intensity, realizing automatic operation, and avoiding bending
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 2
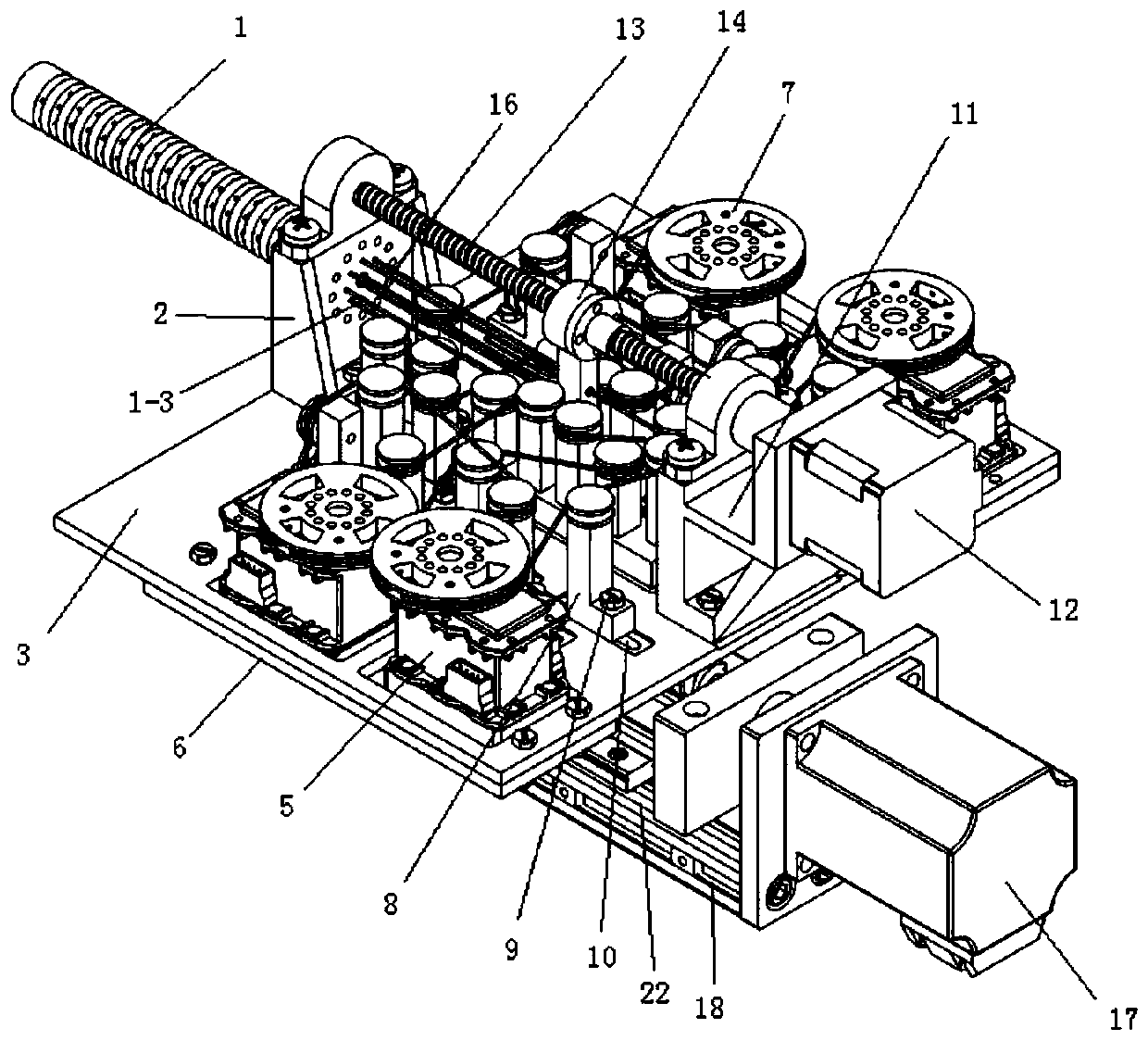
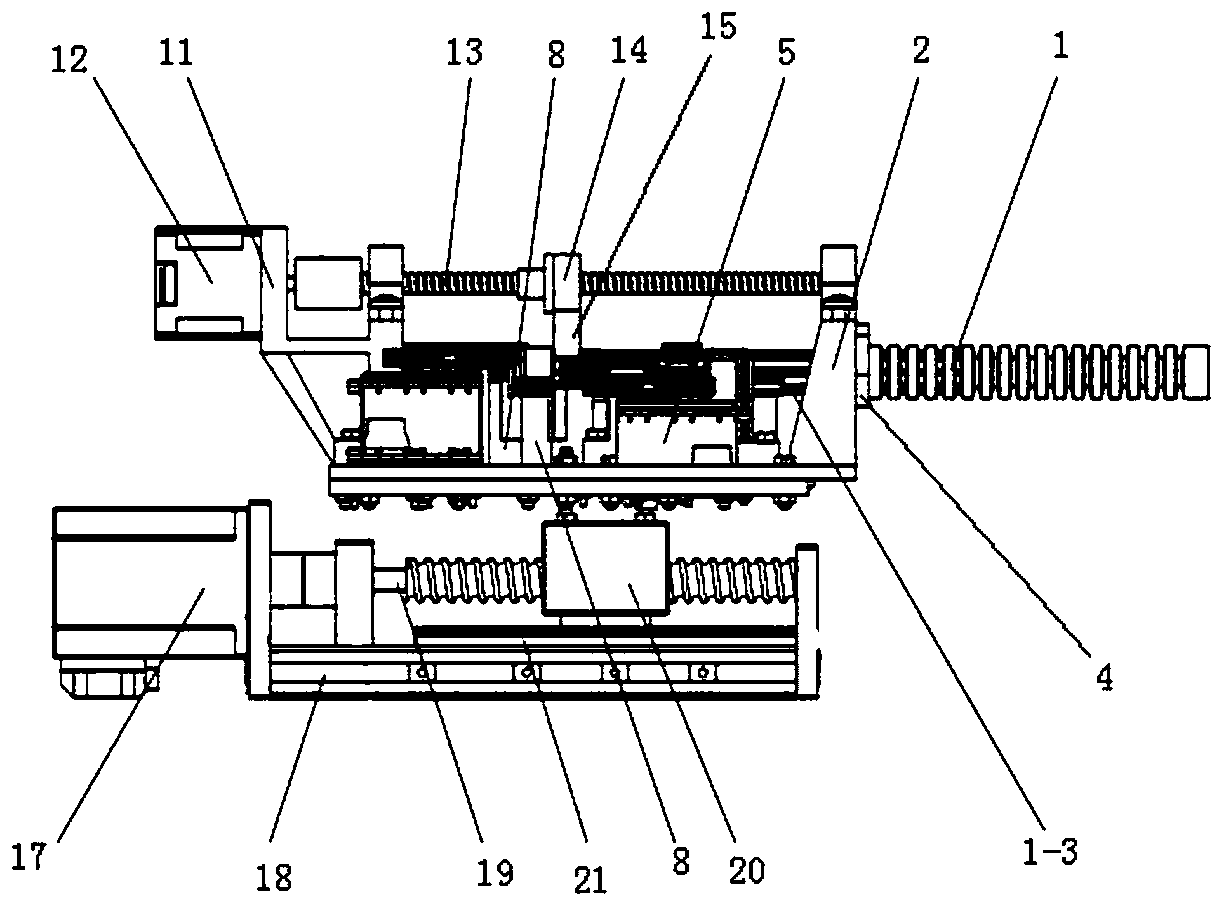
[0056] This embodiment discloses a working method of a variable-stiffness robot for minimally invasive surgery: input the movement path of the end of the robotic arm to the controller in advance according to the surgical target position, and connect the required surgical instruments to the end of the variable-stiffness surgical robotic arm , the second motor works to drive the mechanical arm forward. At the same time, according to the setting of the controller, the four steering gears work together to drive the bending of the mechanical arm, so that the mechanical arm advances in the cavity of the human body according to the set path until the operation When the instrument reaches the target position, during the forward process or during the operation, according to the image fed back by the endoscope or other equipment, the first motor can drive a part of the rigid rod to extend into the rubber tube to provide rigid support for the mechanical arm, avoiding the The support point...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More