Line obstacle identification method based on three-dimensional imaging
A technology of obstacle recognition and three-dimensional imaging, applied in the field of obstacle recognition, can solve problems such as not being able to truly reflect the actual nature of obstacles, not specifically disclosing obstacle recognition and calculation, and being unable to recognize obstacles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
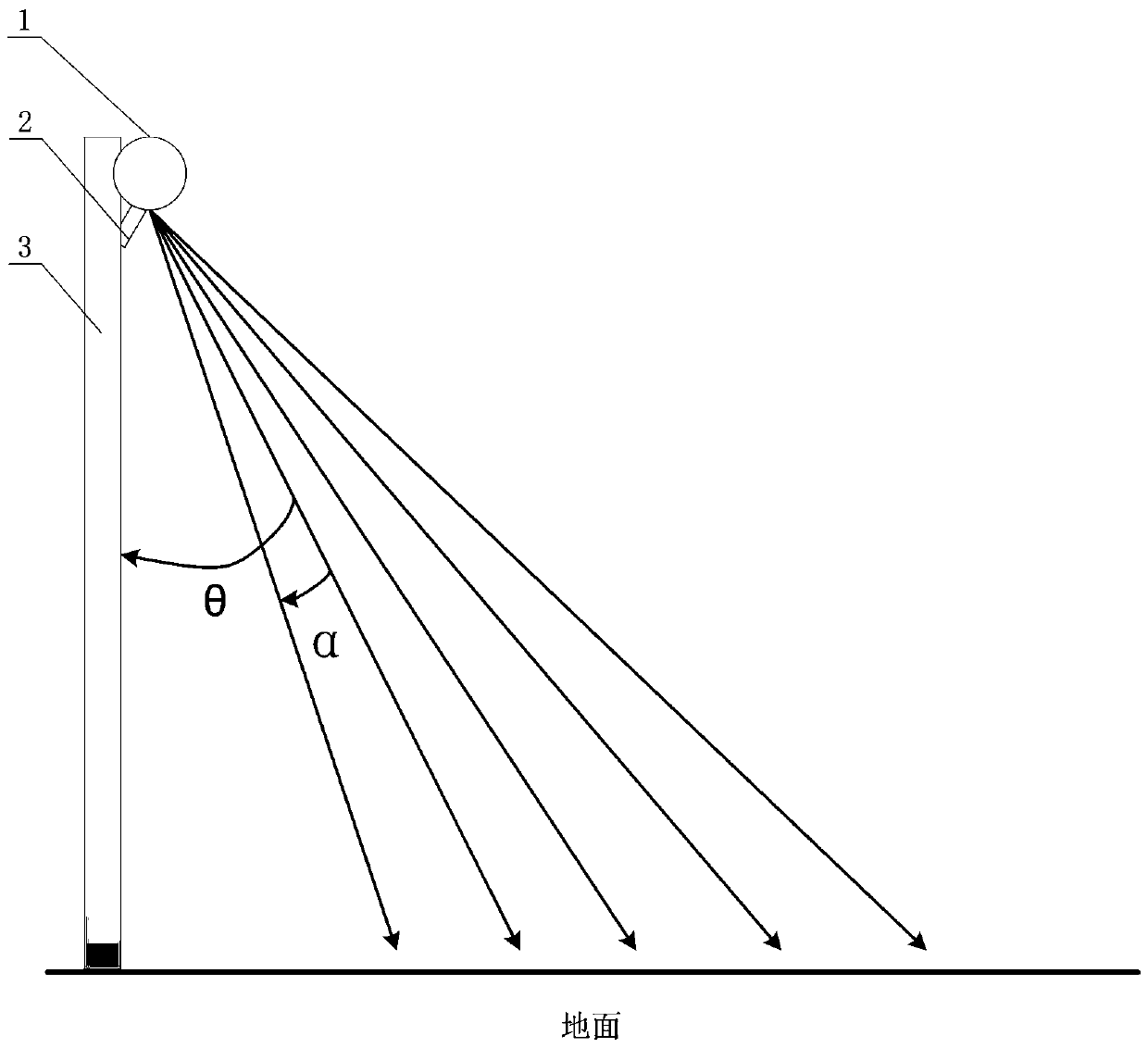
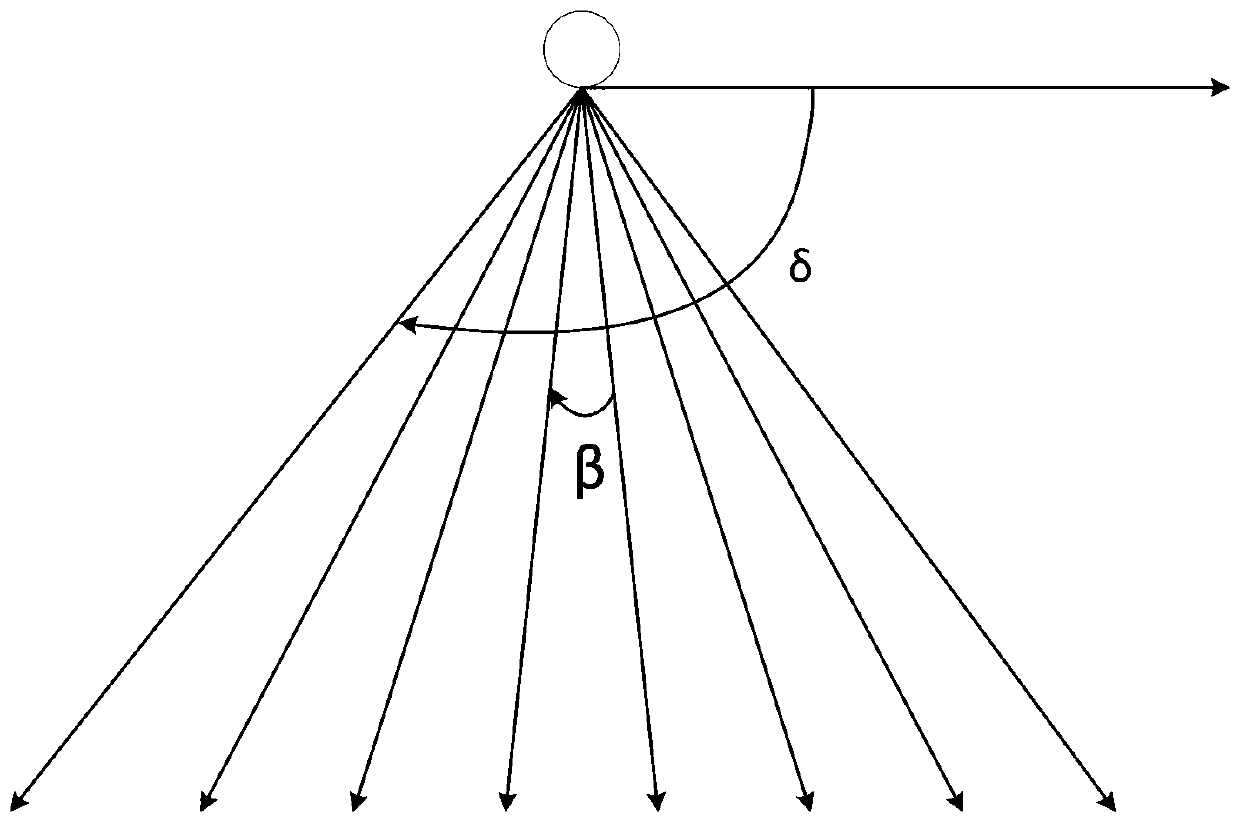
[0034] As attached figure 1 And figure 2 As shown, a line obstacle recognition method based on three-dimensional imaging includes the following steps:
[0035] Create a static 3D point cloud map of the surface
[0036] The plane lidar 1 and the angle adjustment mechanism 2 are arranged, and the scanning period of the plane lidar 1 and the rotation period of the angle adjustment mechanism 2 are set; the plane lidar 1 completes a two scan cycle Scanning of a two-dimensional plan; timing adjustment of the scanning inclination angle of the planar lidar 1 through the angle adjustment mechanism 2 to obtain N corresponding static two-dimensional scanning plan;
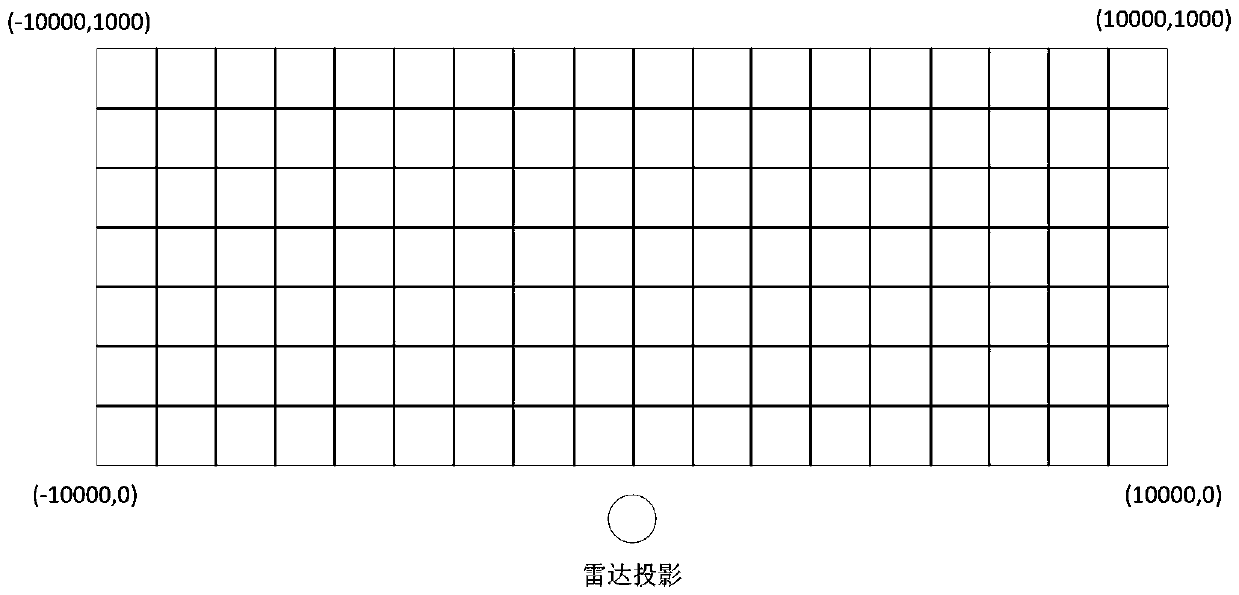
[0037] Carry out square gridding processing on the surface plane to be scanned, and divide it into several square cells, each square cell has corresponding plane coordinates;
[0038] According to the static two-dimensional scanning plan, calculate the original height Sh corresponding to each square cell to obtain a static three-dim...
Embodiment 2
[0055] This embodiment provides a specific implementation manner for obtaining a static three-dimensional point cloud image of the surface, including three steps of setting a basic static three-dimensional point cloud image of the surface, fault tolerance processing, and expansion processing.
[0056] 1) Set the static three-dimensional point cloud image of the basic surface, and the static three-dimensional point cloud image of the basic surface is the static three-dimensional point cloud image of the surface in the embodiment;
[0057] Use one of the static two-dimensional scan plan for analysis, as attached figure 1 And figure 2 As shown, the planar lidar 1 is installed on the radar hoisting rod 3. The installation height of the planar lidar is recorded as H, and the installation height H can be obtained by measurement; the current static two-dimensional scanning plan and vertical ground surface The included angle of is θ, which is the rotation angle θ of the stepping motor; the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



