

Time-optimal trajectory planning system and method for robot path tracking
A trajectory planning, time-optimized technology, applied in control/adjustment systems, instruments, two-dimensional position/channel control, etc., can solve problems such as increasing the trajectory planning calculation time, difficulty in integration, and inaccurate dynamic models.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0100] The object of the present invention will be further described in detail through specific examples below, and the examples cannot be repeated here one by one, but the implementation of the present invention is not limited to the following examples.
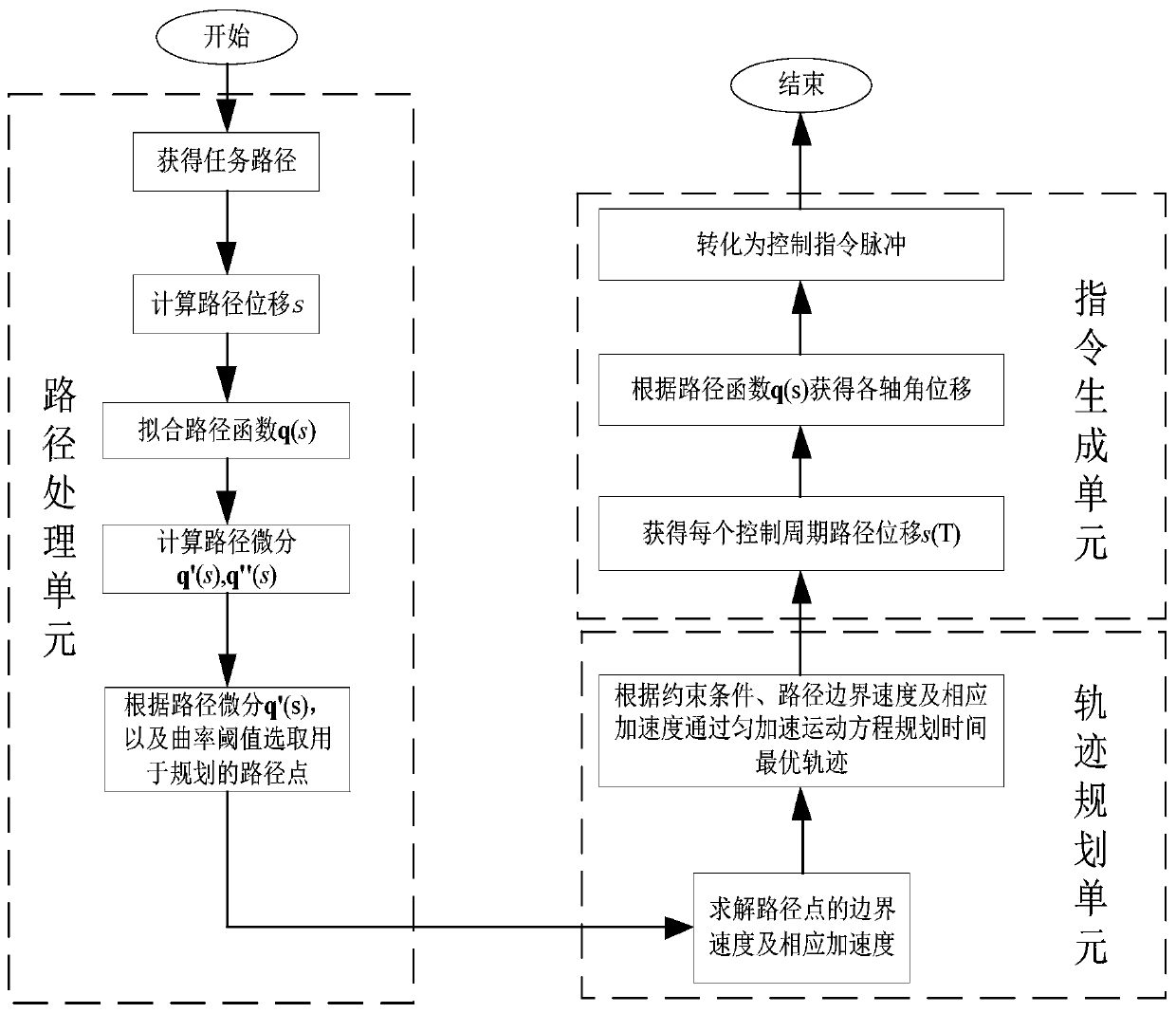
[0101] Such as figure 1 A time-optimal trajectory planning system for robot path tracking shown, the system includes a path processing unit, a trajectory planning unit and an instruction generation unit;
[0102] Wherein, the path processing unit performs path displacement calculation processing, path function fitting processing, path differential coefficient calculation processing, and path planning point selection processing;
[0103] The trajectory planning unit is used to plan the optimal trajectory of the robot on the path displacement velocity plane, assuming that the planning points are uniformly accelerated motion, and plan through the uniformly accelerated motion equation;
[0104] The instruction generation unit i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More