

Fast 3D path planning method for underwater robot based on goal-oriented centralized optimization
An underwater robot and target-oriented technology, applied in three-dimensional position/channel control, etc., can solve problems such as slow convergence speed, high memory requirements, and low efficiency, so as to reduce randomness, improve convergence rate and path quality, and improve The effect of search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
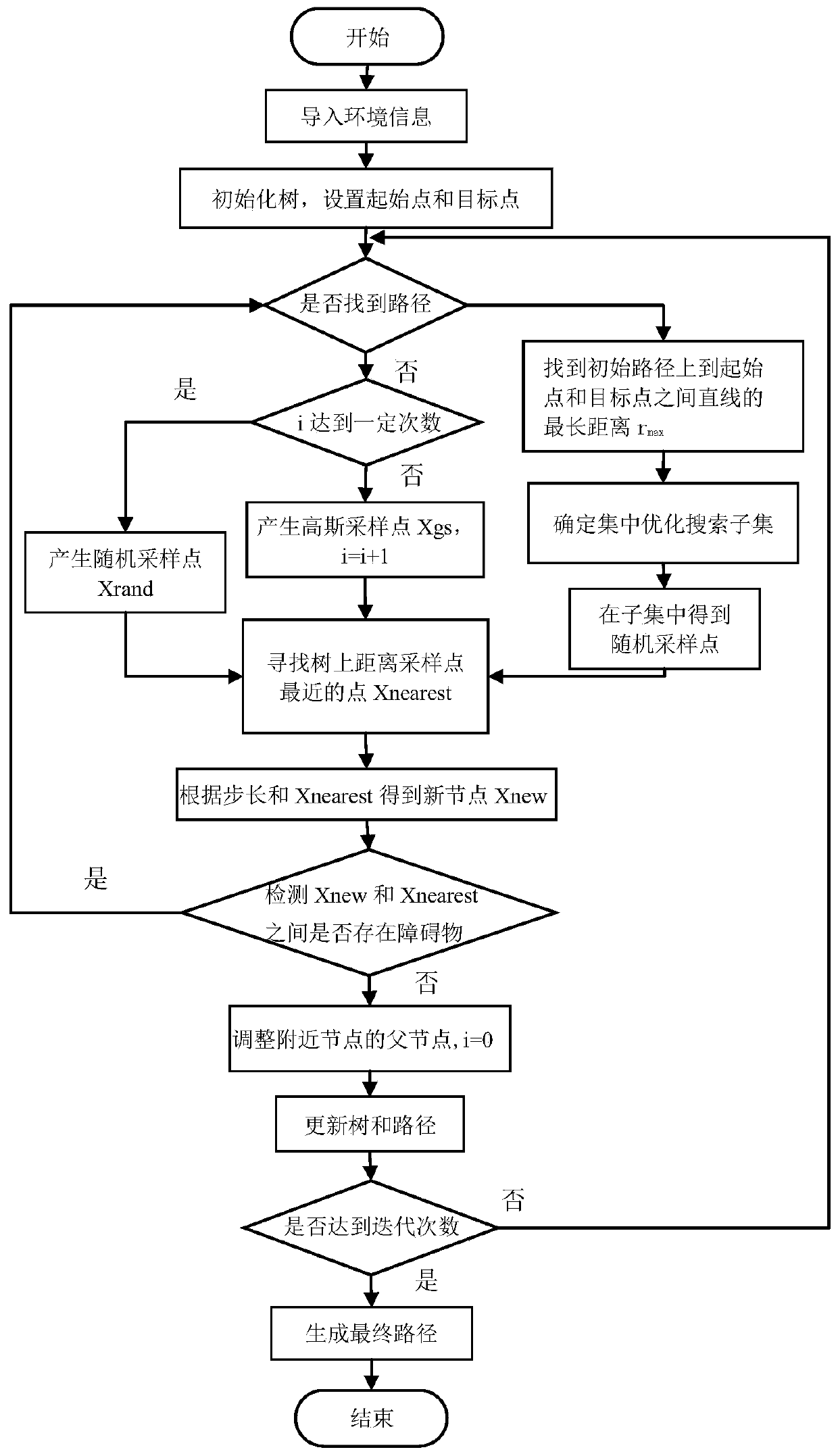
[0036] In order to clearly highlight the purpose and advantages of the present invention, the present invention will be further described below in conjunction with the accompanying drawings in the examples of the present invention, a fast three-dimensional path planning method for underwater robots disclosed in the embodiments of the present invention , the implementation process mainly includes the following steps:
[0037] (1) Import the environment information, set the start point and end point, create a search tree Tree=(V,E) containing the vertex V and the edge E, at the initial moment, V only contains the start point x start , E is an empty set.
[0038] (2) According to the target point coordinates, use the target-oriented Gaussian sampling strategy to take the Gaussian sampling point x in the planning domain gs and assign to x sample .
[0039] (3) Find the point x closest to the sampling point on the tree nearest , according to the formula
[0040] get new node...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More