

Method for changing navigation state of underwater robot and underwater robot with variable navigation states
An underwater robot and attitude technology, applied to underwater ships, underwater operating equipment, instruments, etc., can solve the problems of limited effect, increase ballast diving speed, etc., and achieve the effect of fast vertical movement and high-efficiency cruising
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
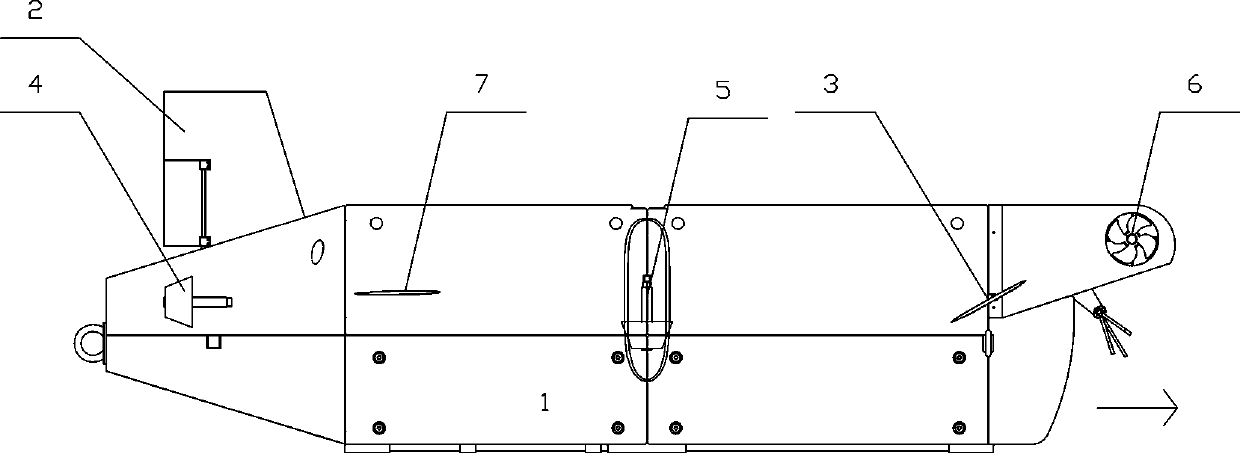
[0022] In order to make the technical solutions and advantages in the embodiments of the present application clearer, the exemplary embodiments of the present application will be further described in detail below in conjunction with the accompanying drawings. Apparently, the described embodiments are only part of the embodiments of the present application, and Not an exhaustive list of all embodiments. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. For the needs of the following description, the distance from the head to the tail of the submersible is defined as the length direction of the submersible, and the direction perpendicular to it is defined as the height direction of the submersible.
[0023] figure 1 An example of a submersible is shown, the Rainbow Fish 11000 ARV. like figure 1 As shown, in order to meet the requirements of "horizontal operatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More