

Liver operation navigation method and system based on structural light scanning
A technology of surgical navigation and structured light, which is applied in the field of surgical navigation, can solve problems such as difficulty for doctors, increased surgical risk, and easy deformation, and achieve the effect of less time, scientific nature, and reduced surgical space requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
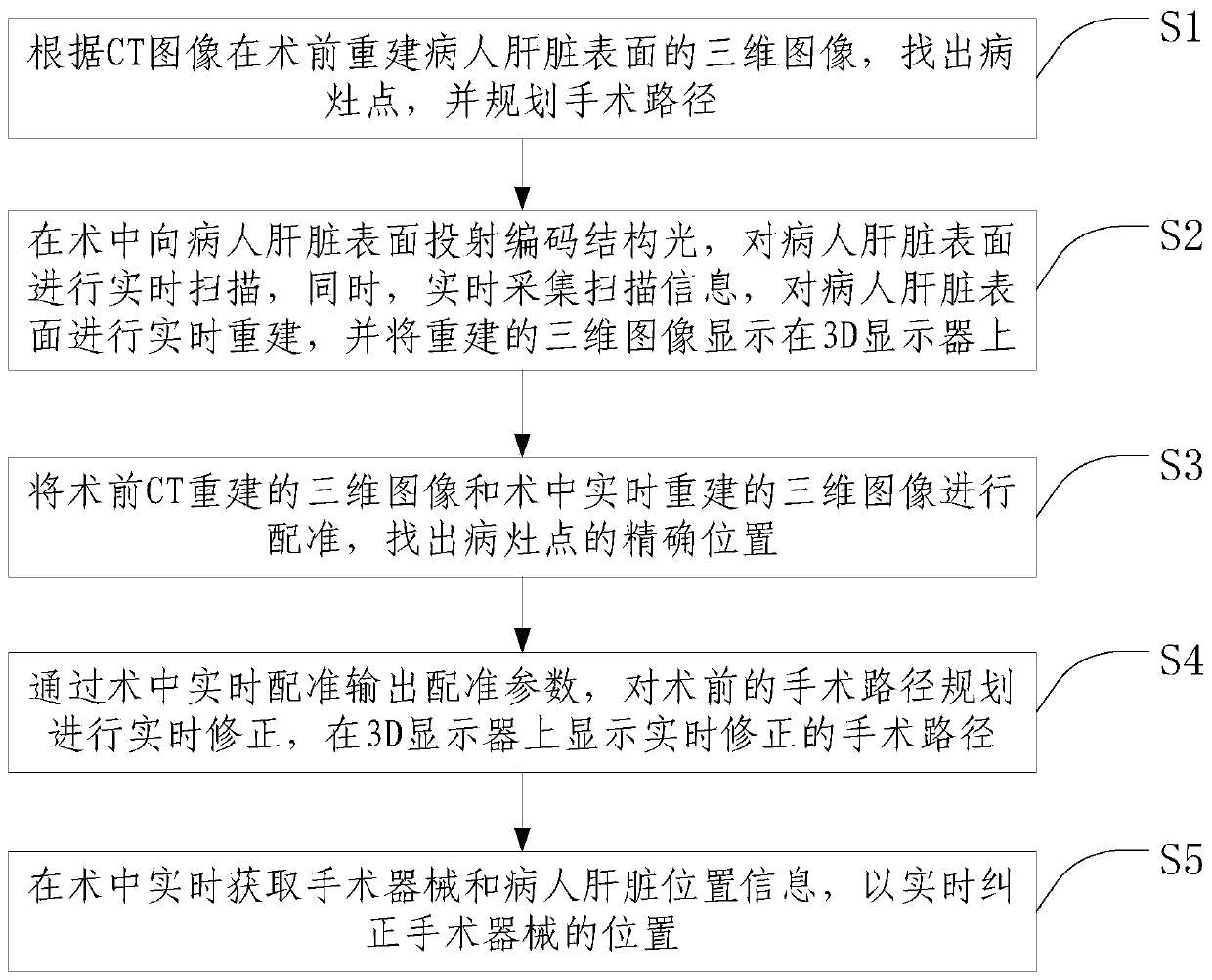
[0043] Such as figure 1 As shown, the liver surgery navigation method based on structured light scanning in Embodiment 1 of the present invention, the method includes the following steps:
[0044] S1. Reconstruct the three-dimensional image of the liver surface of the patient according to the CT image before operation, find out the focus point, and plan the operation path;
[0045] Among them, the three-dimensional image of the patient's liver surface is reconstructed according to the CT image before operation, which specifically includes: marking the patient's liver, performing a CT scan on the marked liver, and performing three-dimensional reconstruction on the slice data obtained by the CT scan.
[0046] S2. Project coded structured light onto the liver surface of the patient during the operation, scan the liver surface of the patient in real time, collect scanning information in real time, reconstruct the liver surface of the patient in real time, and display the reconstru...
Embodiment 2
[0055] A liver surgery navigation system based on structured light scanning, which includes:
[0056]The first reconstruction module is used to reconstruct the three-dimensional image of the patient's liver surface before operation according to the CT image;
[0057] Among them, the three-dimensional image of the patient's liver surface is reconstructed according to the CT image before operation, which specifically includes: marking the patient's liver, performing a CT scan on the marked liver, and performing three-dimensional reconstruction on the slice data obtained by the CT scan.
[0058] The path planning module is used to find out the lesion point according to the above-mentioned three-dimensional image, and plan the operation path;
[0059] The projection module is used to project coded structured light to the surface of the patient's liver during the operation, and scan the surface of the patient's liver in real time;
[0060] Preferably, the projection module is a pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More