Lower limb rehabilitation robot control method and system based on electroencephalogram-myoelectricity signals
A rehabilitation robot and electromyographic signal technology, applied in the field of medical rehabilitation training, can solve problems such as low accuracy and unsatisfactory rehabilitation training effect, and achieve the effects of compact equipment, better training effect and low cost.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in further detail below in conjunction with the accompanying drawings, and those skilled in the art can realize the present invention from the contents disclosed in this specification.
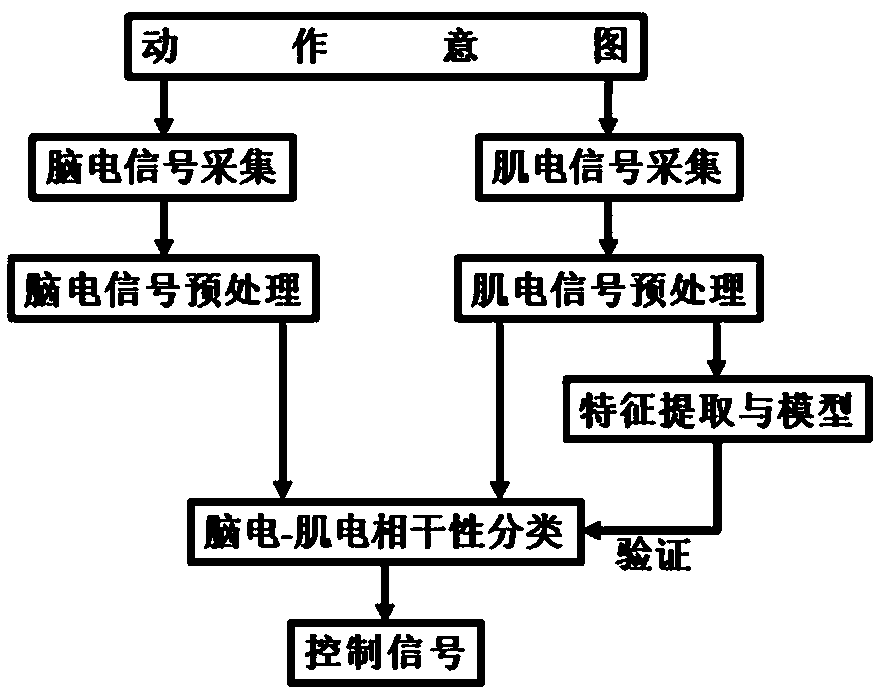
[0052] Such as figure 1 As shown, the present invention is based on EEG-EMG signal lower limb rehabilitation robot control method, comprising the following steps:
[0053] Step 1: First, the user has an exercise intention, and then collects physiological signals through the physiological signal acquisition module. The physiological signal acquisition includes synchronous acquisition of EEG signals and EMG signals;
[0054] The physiological signal acquisition module includes EMG acquisition equipment and EEG acquisition equipment. The EMG acquisition equipment is the Noraxon wireless surface EMG test system. The EMG acquisition electrodes are respectively attached to the muscles of the left and right legs, that is, the quadriceps of the thighs. F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More