Pose determination method and device, odometer
A pose, image frame technology, applied in the field of computer vision, to avoid geometric position errors, high accuracy, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
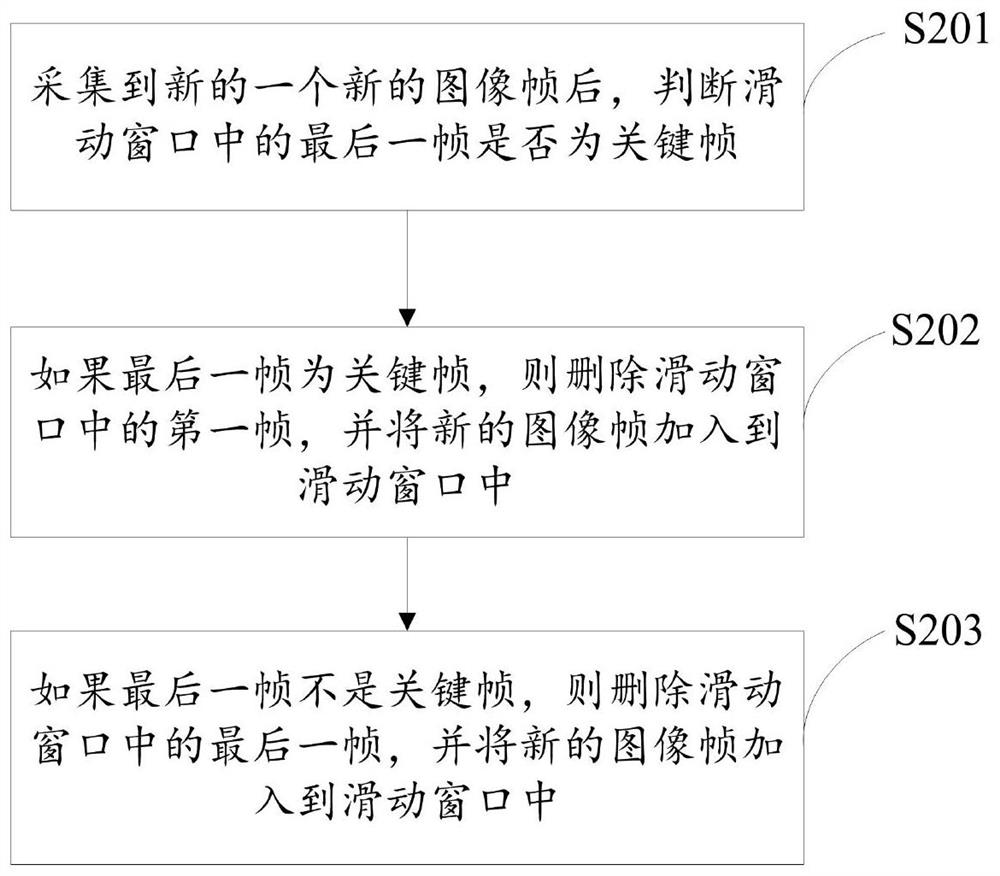
[0068] figure 2 An implementation manner of updating the image frames in the sliding window in the above embodiment may specifically include:
[0069] S201: After acquiring a new image frame, determine whether the last frame in the sliding window is a key frame.
[0070] In this embodiment, the last frame in the sliding window is the image frame with the latest timestamp in the sliding window, that is, the image frame with the latest acquisition time. In order to update the sliding window in real time, after each new image frame, it is judged whether the last frame in the sliding window is a key frame.
[0071] Optionally, judging whether the last frame in the sliding window is a key frame can be judged according to the size of the motion distance between the last frame and the new image frame, if the motion distance is not greater than the preset threshold, it means that the last frame If the moving distance from the new image frame is relatively short, it is judged that t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com