

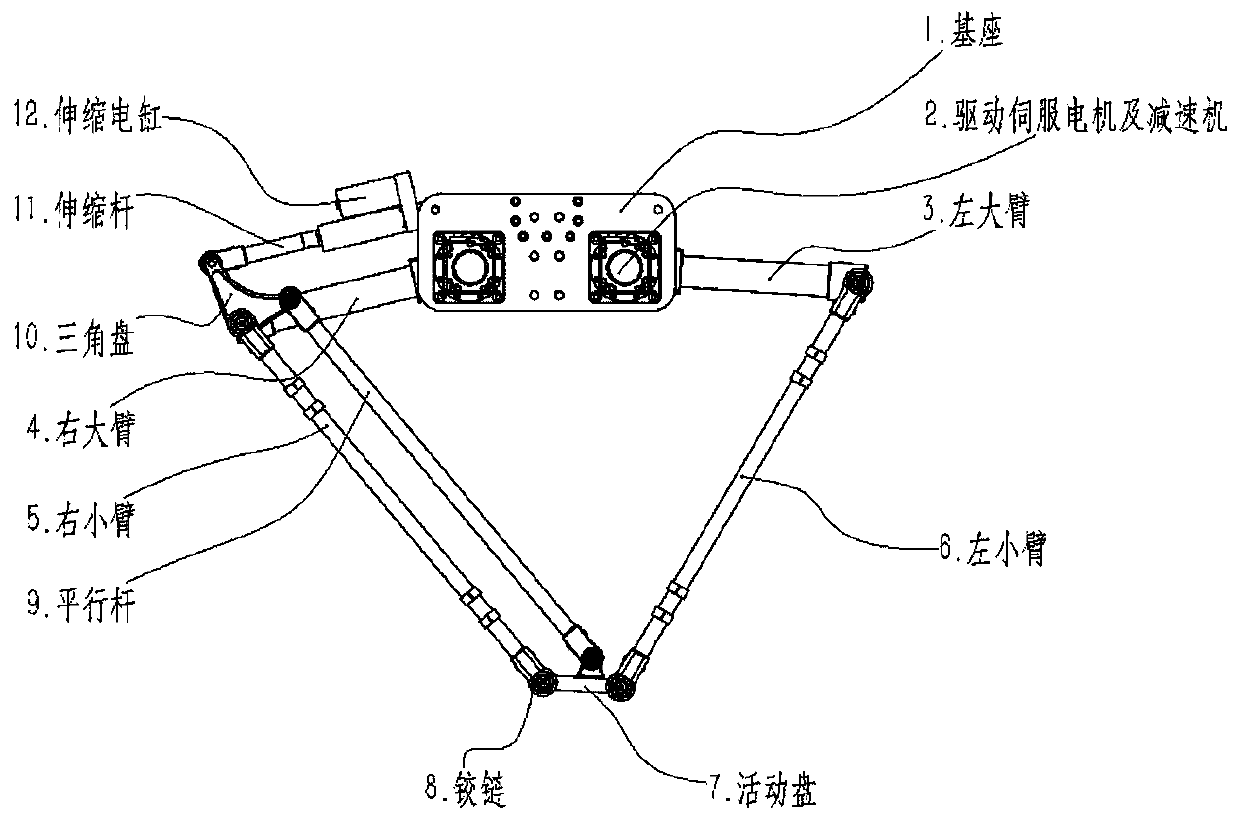
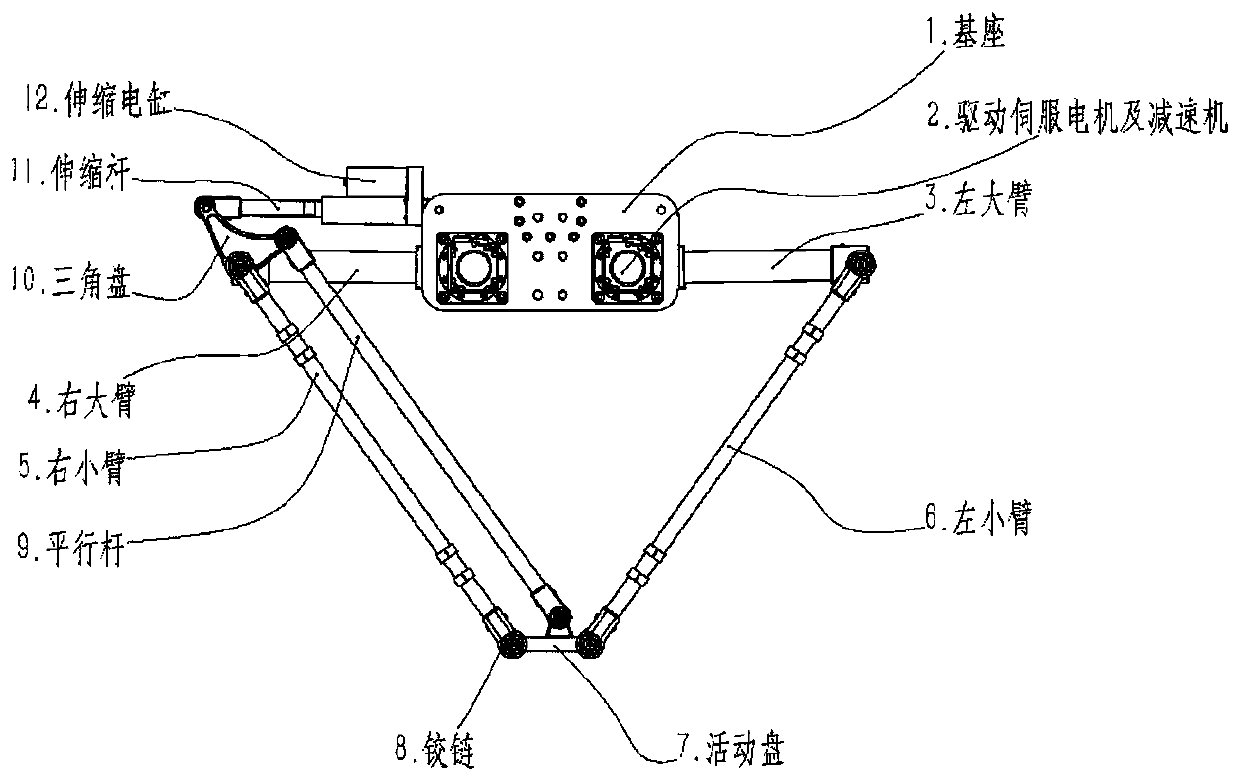
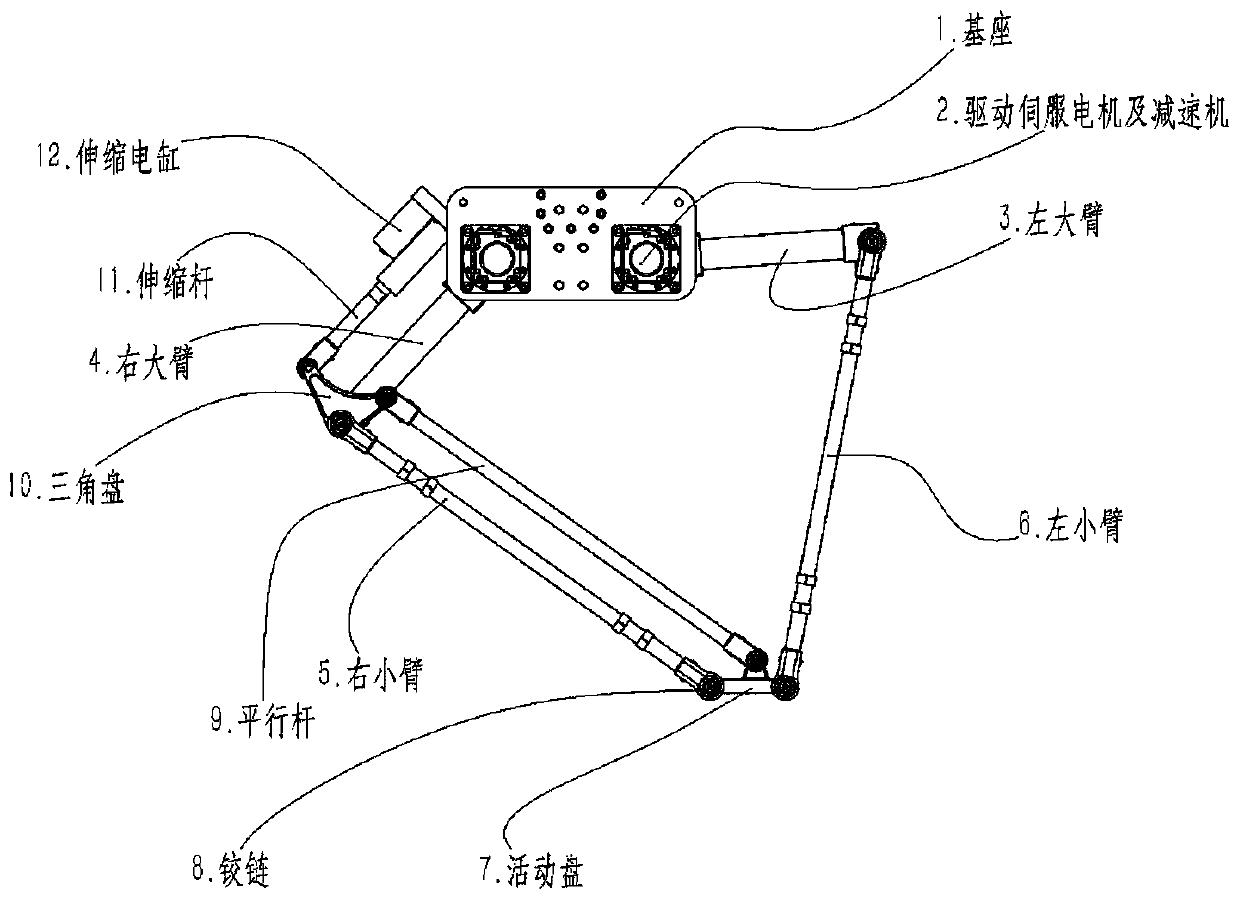
Parallel mechanism for three-degree-of-freedom robot
A degree of freedom, robot technology, applied in the field of robots, can solve the problems of complex robot structure, achieve the effect of light weight, strong bearing capacity and small inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Reference will now be made in detail to the exemplary embodiments of the invention, examples of which are illustrated in the accompanying drawings. The detailed description, which will be given below with reference to the accompanying drawings, is intended to explain exemplary embodiments of the present invention, rather than to show the only embodiments that can be implemented according to the present invention. The following detailed description includes specific details in order to provide a thorough understanding of the present invention. It will be apparent, however, to one skilled in the art that the present invention may be practiced without these specific details.
[0027] In some instances, well-known structures and devices are omitted or shown in block diagram form, focusing on important features of the structures and devices, so as not to obscure the concept of the present invention. The same reference numerals will be used throughout the specification to re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More