A Machine Learning Based Joint Friction Identification Method for Serial Robots
A technology of robot joints and machine learning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inaccurate friction modeling and identification methods, achieve good practical significance, solve the inaccurate model, and achieve significant economic benefits Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
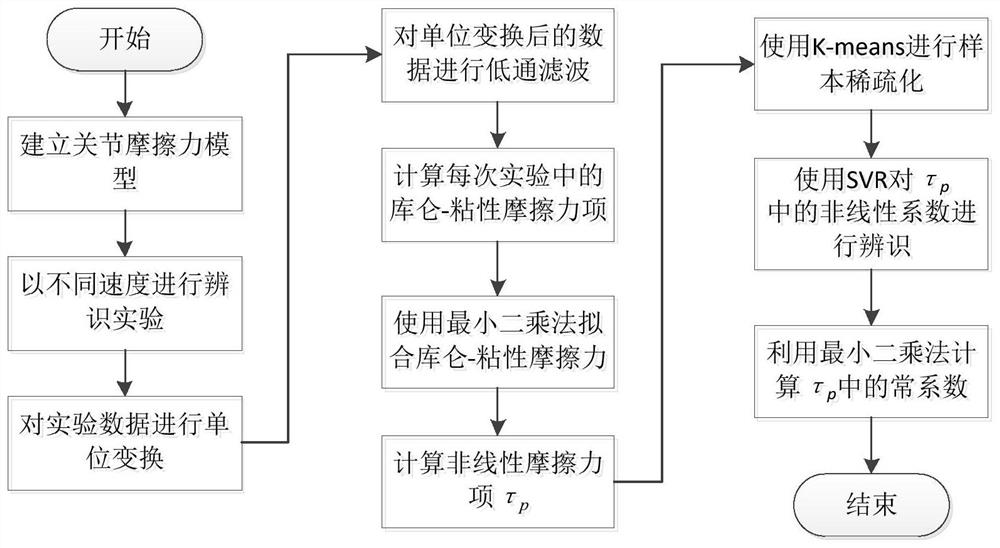
[0042] like figure 2 As shown, a machine learning-based joint friction identification method for series robots, the method is based on a robot joint friction identification platform including a six-axis industrial robot and a host computer, including the following steps:
[0043] S1. According to the periodic variation of the joint torque exhibited during the working process of the six-axis industrial robot, a model of the joint friction force of the six-axis industrial robot on the joint rotation angle and joint angular velocity is established;
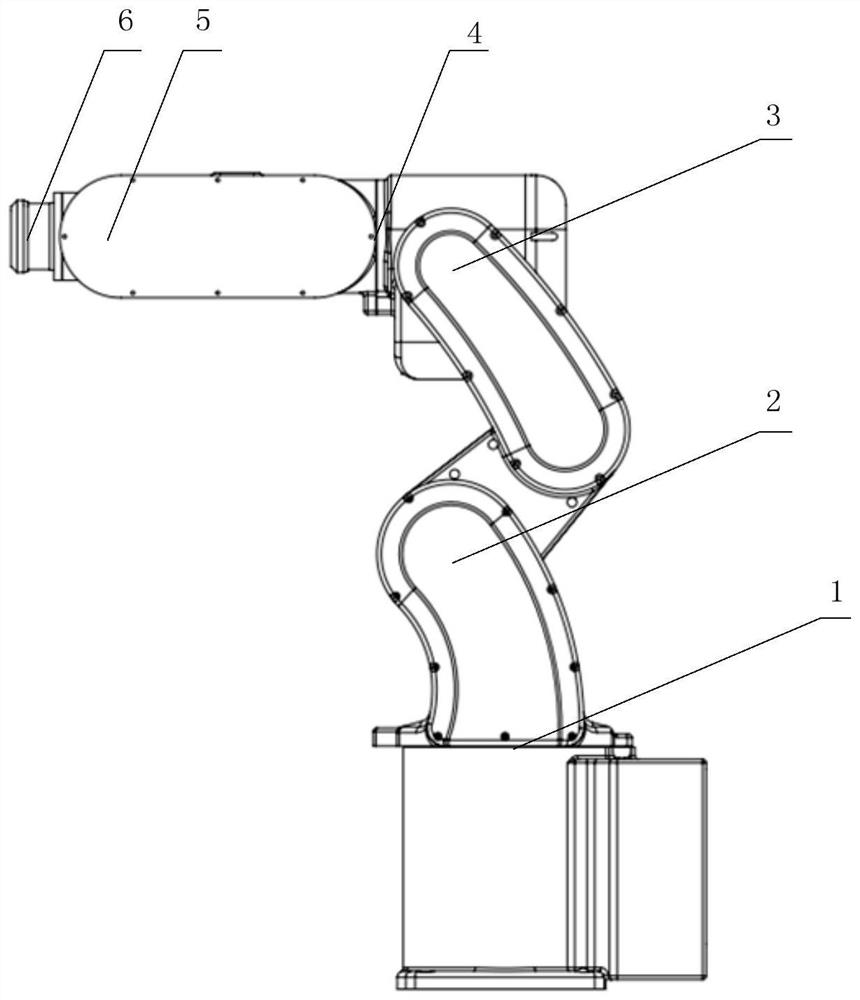
[0044] S2, in a such as figure 1 The single-joint identification experiment is carried out on a six-axis industrial robot, which includes the first joint 1, the second joint 2, the third joint 3, the fourth joint 4, the fifth joint 5, and the sixth joint 6 in series; The sampling period is to collect the data during the experiment, and the state information to be collected includes the indication of the joint motor encoder and the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More