

Sparse multi-view-angle three-dimensional reconstruction method for indoor scene
A technology for 3D reconstruction and indoor scene, which is applied in the fields of computer vision and computer graphics to achieve good scalability and easy implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
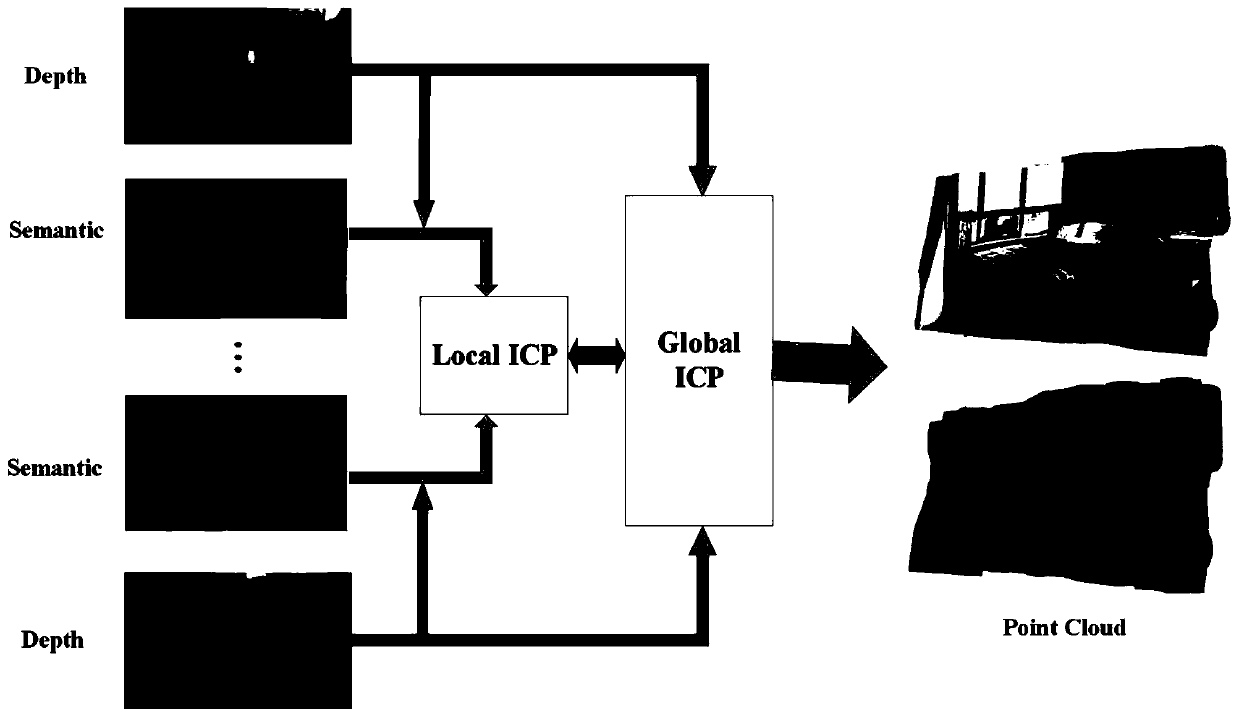
[0030] The invention utilizes the color images of sparse viewing angles to reconstruct the indoor three-dimensional scene. Firstly, the existing method is used to calculate the depth map and semantic map corresponding to each color image, and then the global-local registration method proposed by us is used to realize the fusion of 3D point cloud models of each sparse perspective. like figure 1 As shown, it is a flow chart of the indoor reconstruction based on the color picture three-dimensional scene of the embodiment of the present invention, and the specific implementation scheme is as follows:
[0031] 1) Take 3 to 5 images in an indoor scene, and use a sparse perspective to shoot, but there is still a certain degree of overlap between each two. Compared with the tracking method, the photographer has more room for movement, and Easier to operate.
[0032] 2) Use existing methods to estimate the depth map and semantic map corresponding to each color image.
[0033] 3) Fil...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More