

Control method, device and equipment for automatic drive of vehicle and readable storage medium
A technology of automatic driving and control method, applied in the field of device, control method of automatic driving vehicle, equipment and readable storage medium, can solve the problems of potential safety hazards, poor vehicle somatosensory, short upper-layer logic reaction time, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
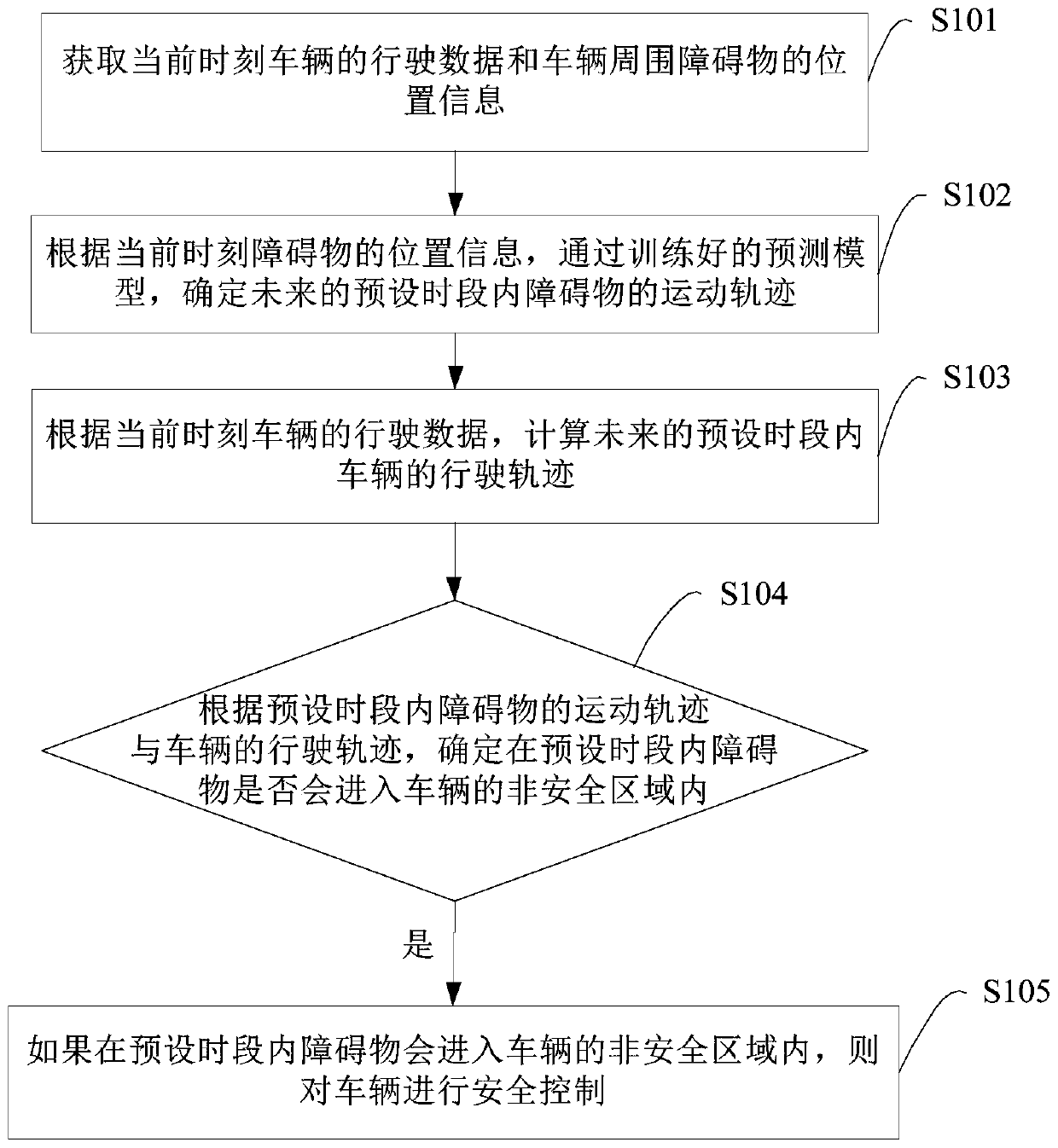
[0031] figure 1 It is a flow chart of the control method of the self-driving vehicle provided by Embodiment 1 of the present invention. The embodiments of the present invention aim at the prior art, where the vehicle safety control of the upper-level logic is performed according to the distance between the obstacle and the vehicle at the current moment, the reaction time for the upper-level logic is short, and the self-driving vehicle is prone to traffic accidents, which has potential safety hazards, and The problem of the poor somatosensory feeling of the vehicle provides a control method for the self-driving vehicle.
[0032] The method in this embodiment is applied to a terminal device, which may be a vehicle-mounted terminal of a self-driving vehicle, or a remote server device capable of controlling the driving of a self-driving vehicle, etc. In other embodiments, the method may also be applied For other devices, this embodiment uses a vehicle-mounted terminal as an examp...
Embodiment 2
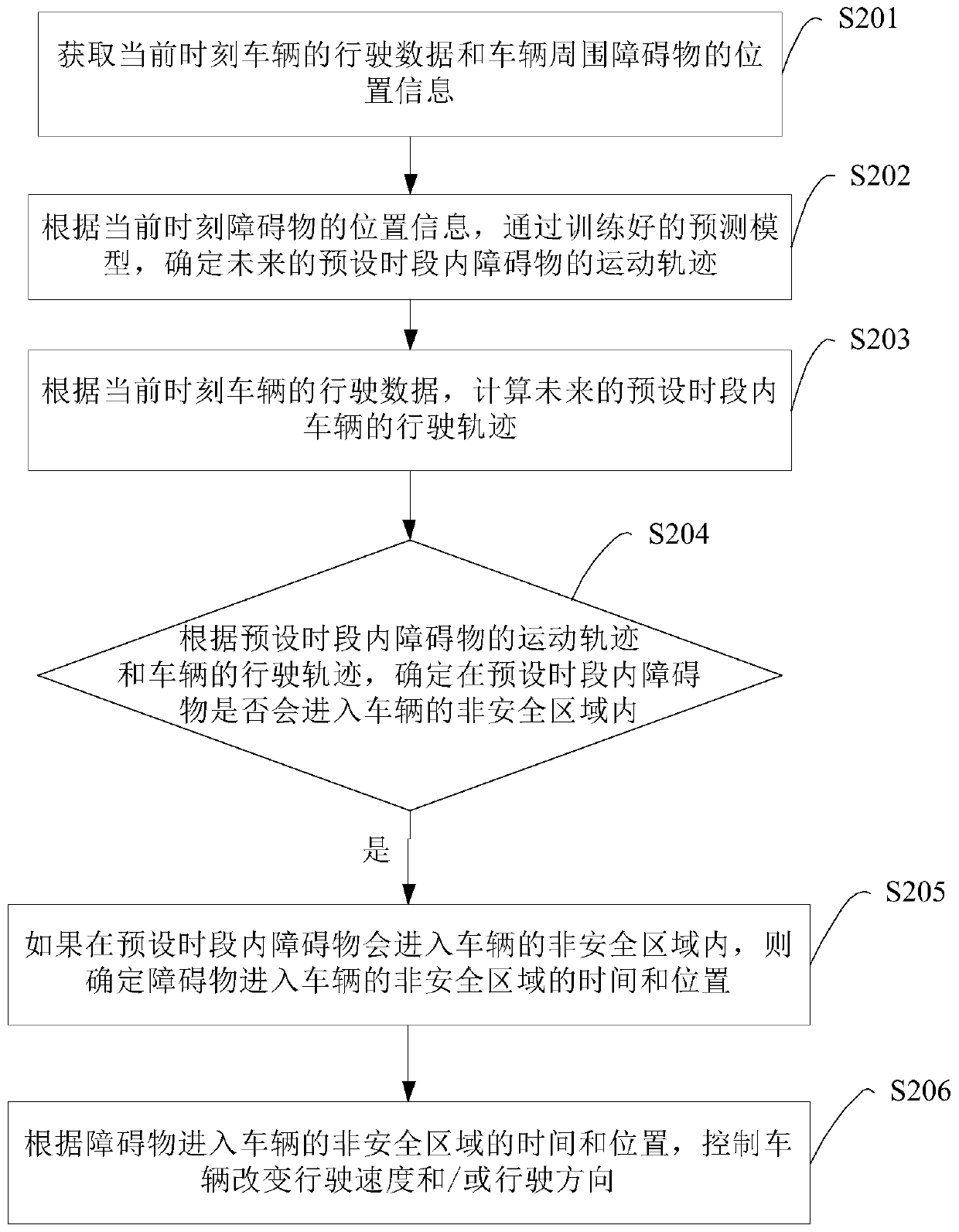
[0055] figure 2 It is a flow chart of the control method of the self-driving vehicle provided in Embodiment 2 of the present invention. On the basis of the first embodiment above, in this embodiment, if the obstacle will enter the unsafe area of the vehicle within a preset period of time, then determine the time and position when the obstacle enters the unsafe area of the vehicle; The time and location of non-safe areas of the vehicle, control the vehicle to slow down and / or change the direction of travel.
[0056] like figure 2 As shown, the specific steps of the method are as follows:
[0057] Step S201, acquiring the driving data of the vehicle at the current moment and the location information of obstacles around the vehicle.
[0058] Wherein, the driving data of the vehicle includes at least: the location, the driving speed and the driving direction, and the driving data may also include the pose information of the vehicle, the driving route and so on. In additi...
Embodiment 3
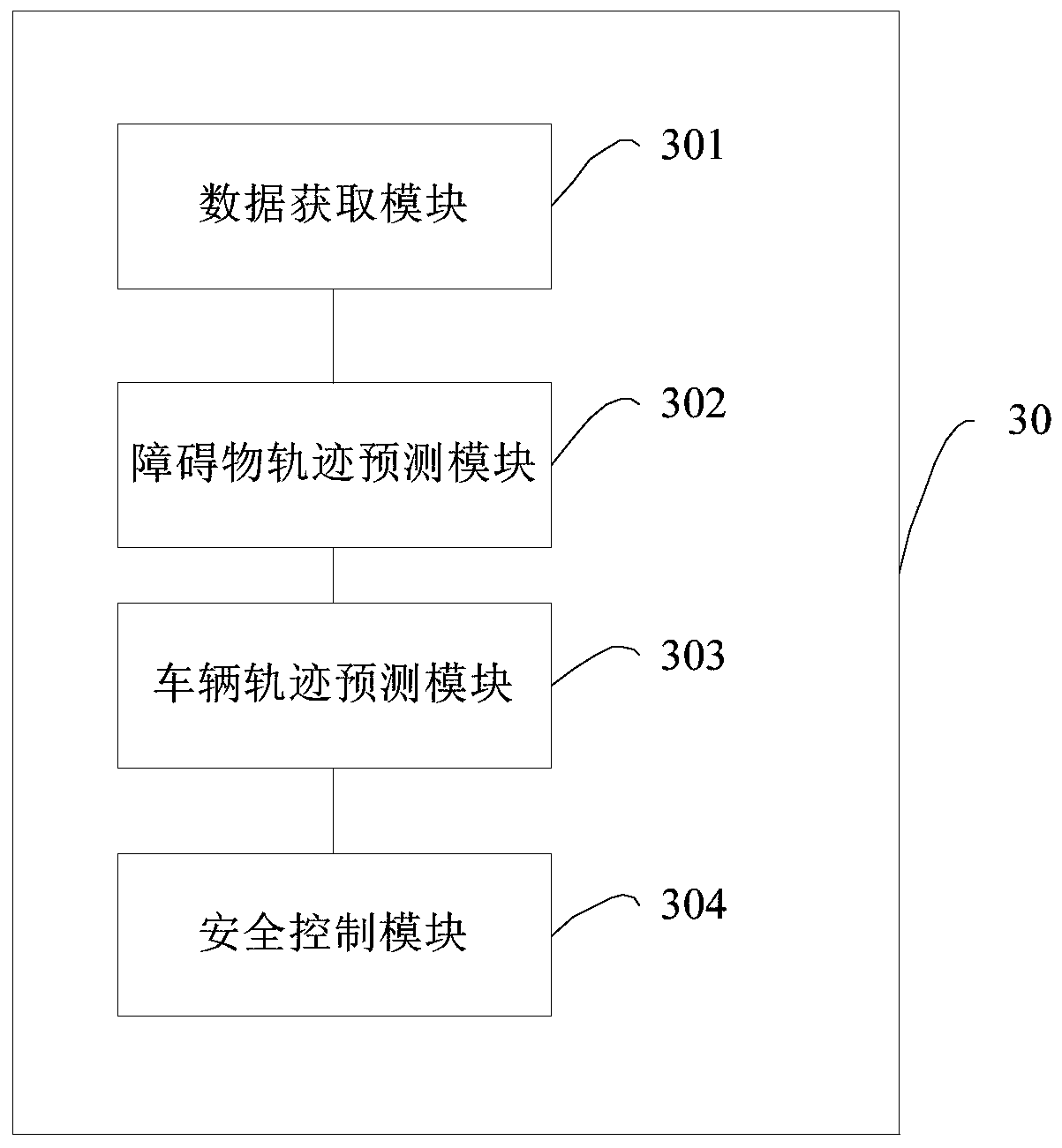
[0107] image 3 It is a schematic structural diagram of a control device for an automatic driving vehicle provided in Embodiment 3 of the present invention. The control device for the automatic driving vehicle provided in the embodiment of the present invention can execute the processing procedure provided in the embodiment of the control method for the automatic driving vehicle. like image 3 As shown, the control device 30 of the self-driving vehicle includes: a data acquisition module 301 , an obstacle trajectory prediction module 302 , a vehicle trajectory prediction module 303 and a safety control module 304 .
[0108] Specifically, the data acquisition module 301 is configured to acquire the driving data of the vehicle at the current moment and the location information of obstacles around the vehicle.
[0109] The obstacle trajectory prediction module 302 is configured to determine the trajectory of the obstacle within a preset time period in the future through the tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More