

Space-based starry sky background weak point target tracking method based on threshold separation cluster
A technology of starry sky background and point target, which can be used in instruments, image analysis, image data processing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0074] It is difficult for the existing algorithms to deal with the background noise that always exists in the scene, and it is easy to regard these background noises as new targets. When clustering, the stars at special positions are grouped into one category, and the threshold is set to a fixed value, resulting in a huge Tracking error; on the other hand, the moving sensor platform causes the moving target background, which is the difficulty of space-based infrared weak and small target tracking; therefore, based on the above problems, this application provides a high-precision space-based starry sky background weak point target tracking method ,Details as follow:
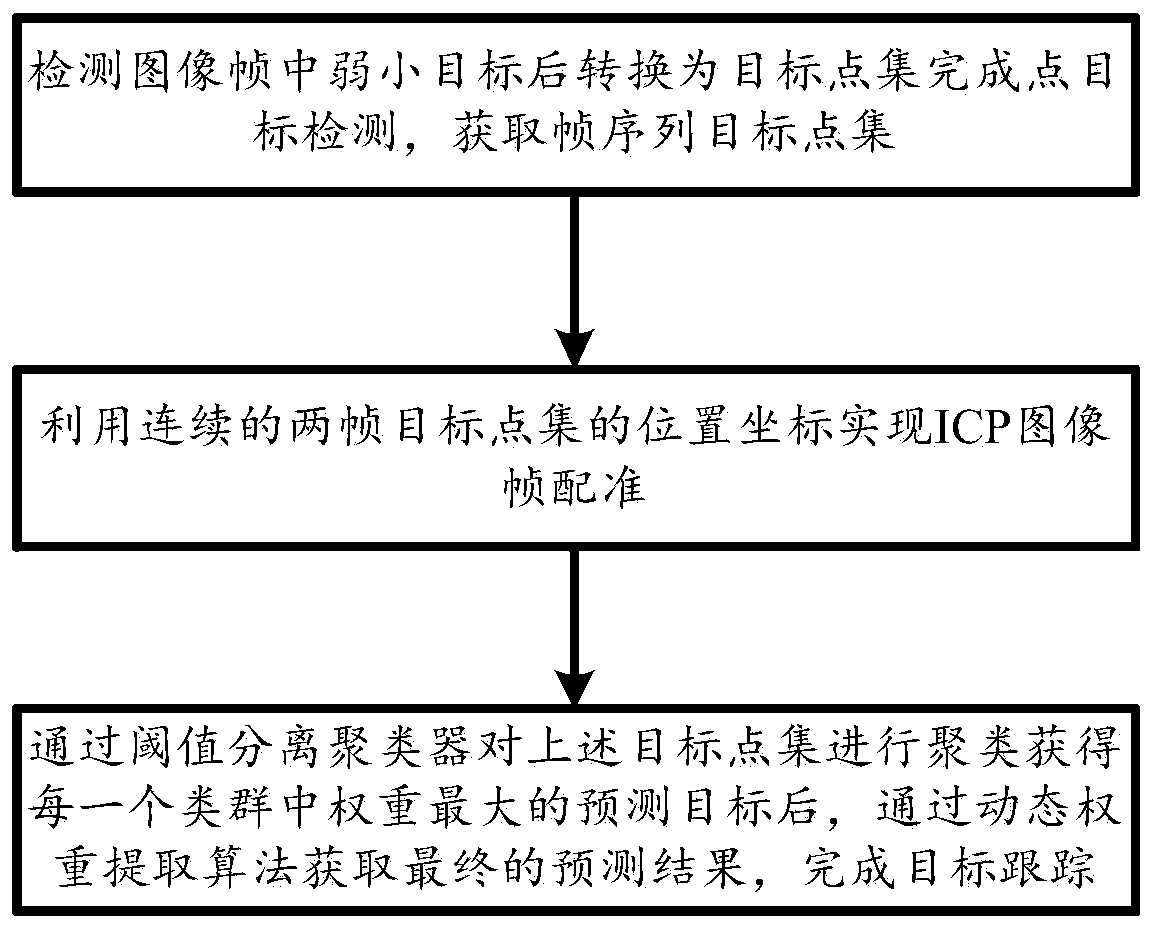
[0075] The space-based starry sky background weak point target tracking method based on the threshold separation clusterer includes the following steps:
[0076] Step 1: After detecting weak and small targets in the image frame, convert them into target point sets to complete point target detection, and obtain fr...
Embodiment 2
[0144] The present invention is based on embodiment 1, and this embodiment is data set 2 of scenario 2, such as image 3 As shown, the star movement is frequent in this data set. The target in the lower left corner will move in a small constellation for more than 5 time steps, and other targets will be disturbed by the stars during the movement process; the effect is as follows Figure 7 Shown:
[0145] As shown in Figures a and b, the GM-PHD algorithm still recognizes close stars as real targets. In the first 34 time steps, the forward-backward smoothing filter algorithm showed a very good tracking and prediction ability, but in the subsequent time steps, because the target in the lower left corner entered a constellation consisting of three stars , causing the algorithm to identify all three stars as real targets. Although the N-scan algorithm has no false missed detection in this data set, it loses the position information of the real target when the target in the lower ...
Embodiment 3
[0147] On the basis of embodiment 1, the present invention is data set 3 of scenario 3, such as Figure 4 As shown in , the special case where two targets are disturbed by close stars during the encounter process is used to evaluate the robustness of the algorithm when clustering different targets at close range. The effect is as Figure 8 Shown:
[0148] Scenario 3 tests the special situation where two targets are disturbed by close stars during the encounter process. By observing the pictures a to h, it is found that the three comparison algorithms recognize the star at the intersection position as the real target, and the N-scan algorithm is also behind False missed detections occurred in the time step of . However, the algorithm of this application can obtain the overlapping clusters formed by two real objects during clustering, and remove the interference information of stars through the dynamic weight extraction method, so that the algorithm can well avoid this kind of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More