

Target positioning device and method for follow robots
A technology for following robots and target positioning, which is applied in the field of target positioning devices for following robots, which can solve the problems of poor interaction friendliness and large color contrast, achieve good environmental adaptability, and realize the effect of multi-target recognition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
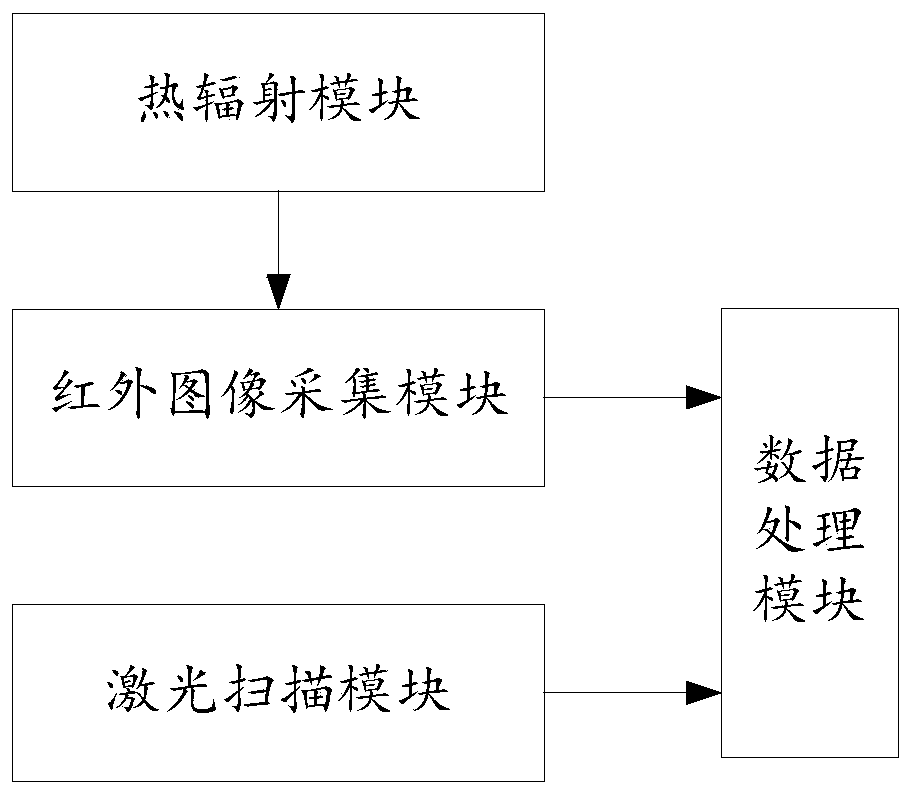
[0044] figure 1 It is a schematic structural diagram of a target positioning device for a following robot according to an embodiment of the present disclosure.
[0045] Such as figure 1 As shown, a target positioning device for following a robot in this embodiment includes:
[0046] a heat radiation module, which is used to generate heat radiation;
[0047] An infrared image acquisition module, which is used to collect infrared images generated by thermal radiation;
[0048] Laser scanning module, which is used to collect scene depth point cloud data;
[0049] The data processing module is connected to the infrared image acquisition module and the laser scanning module respectively, and is used to receive the infrared image generated by thermal radiation and the depth point cloud data of the scene, and to locate the target.
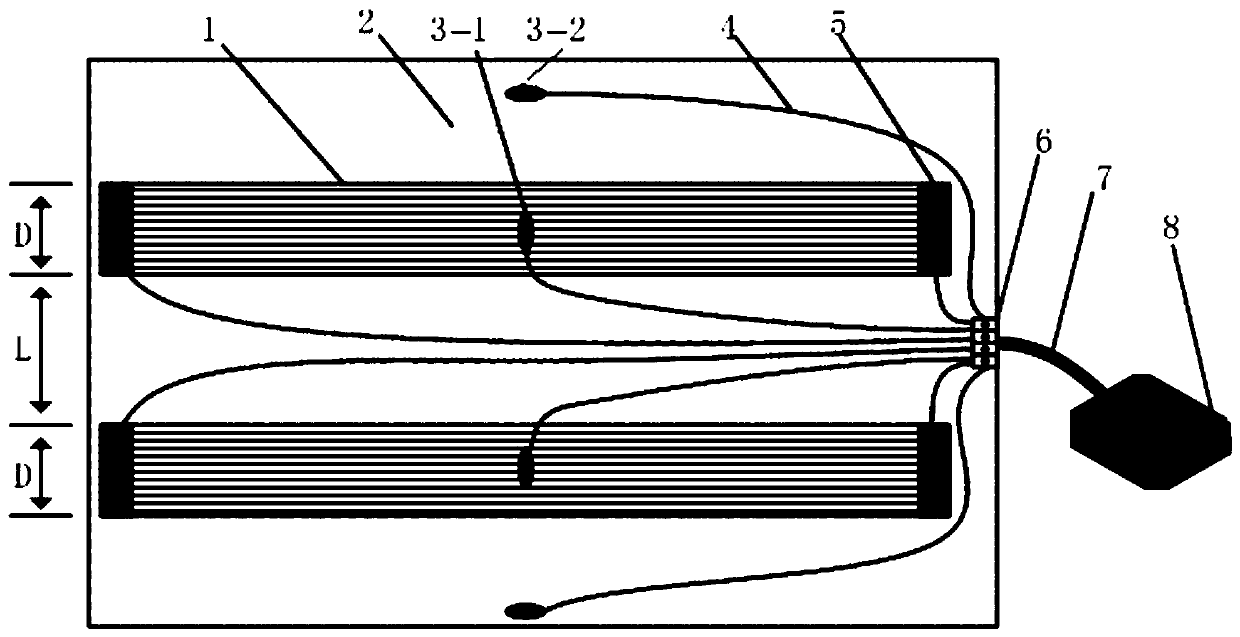
[0050] Wherein, in the embodiment of the present disclosure, all heating strips are in a heating state.
[0051] Compared with other video images, i...
Embodiment 2
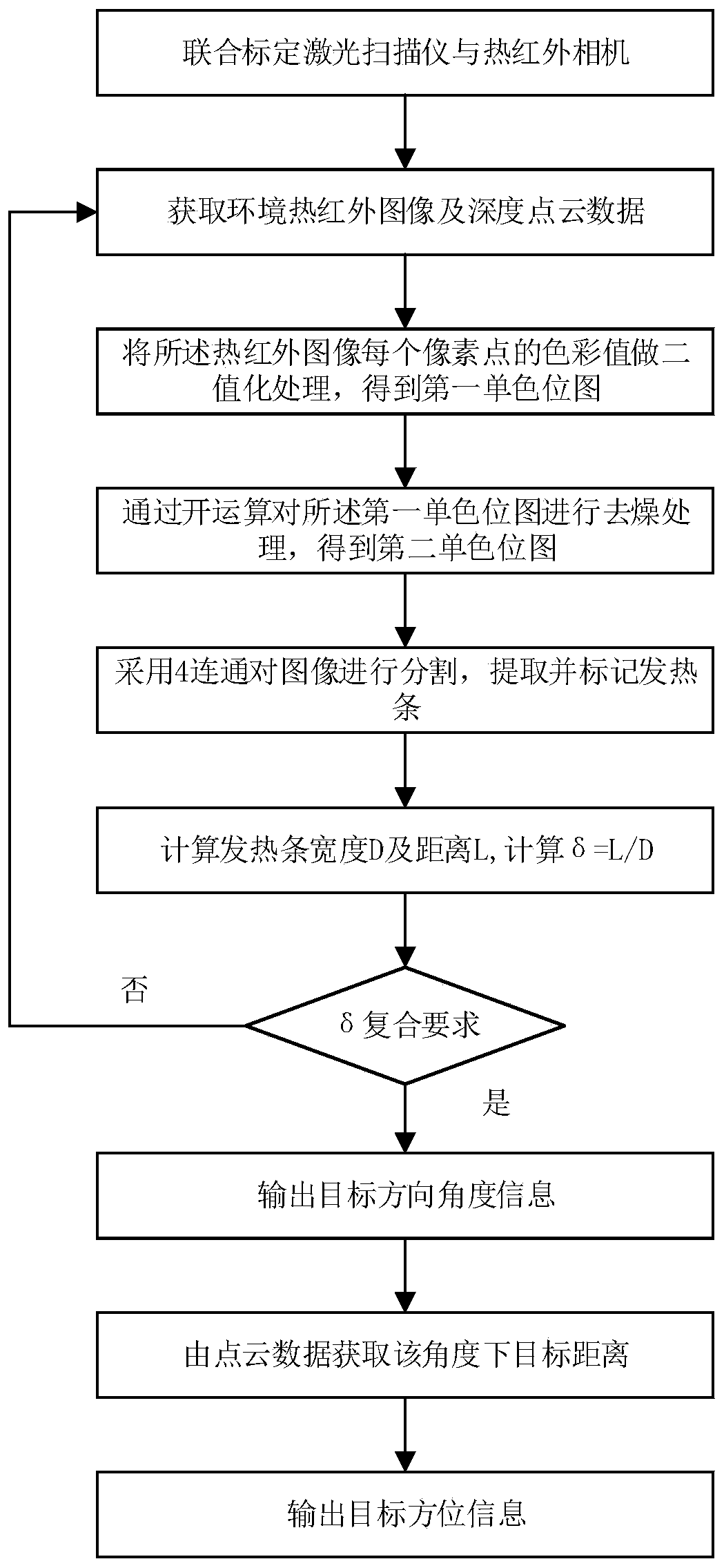
[0094] The positioning method of the target positioning device following the robot in this embodiment includes:
[0095] Receive infrared images and scene depth point cloud data;
[0096] Detect the edge curve of the heating strip in the infrared image;
[0097] Among them, the process of detecting the edge curve of the heating strip in the infrared image is:
[0098] Binarize the gray value of each pixel in the infrared image to obtain the first unit color bitmap;
[0099] performing denoising processing on the first unit color bitmap to obtain a second unit color bitmap;
[0100] The color bitmap of the second unit is segmented by multi-connection method to obtain the edge curve of the heating strip.
[0101] Calculate the average value of all pixel coordinates on the edge curve of the heating strip to obtain the center coordinate of the heating strip, and then obtain the width of the heating strip and the distance between the heating strips;
[0102] Use the ratio of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More