Four-rotor aircraft safety control method based on high-order disturbance observer
A quadrotor aircraft and disturbance observer technology, applied in vehicle position/route/altitude control, attitude control, non-electric variable control, etc., can solve the problem of inaccurate modeling, high requirements for system model accuracy, and poor safety performance of aircraft. Strong and other problems, to eliminate modeling errors and ensure stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be described in further detail below in conjunction with the accompanying drawings.
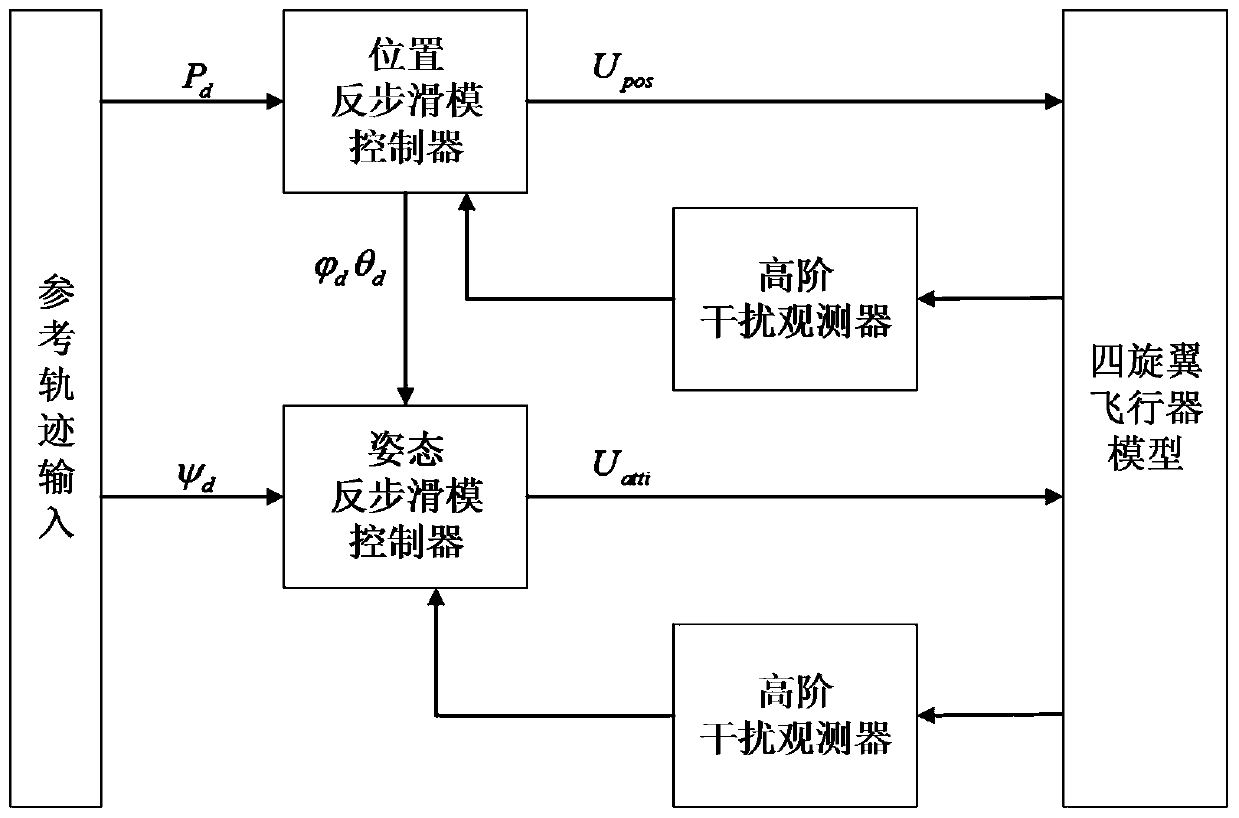
[0024] figure 1 , given the desired input (including the desired three-dimensional position coordinates P d and desired heading angle ψ d ), which are sent to the backstepping sliding mode controller of the attitude loop and the backstepping sliding mode controller of the position loop respectively, wherein the other two expected attitude inputs of the attitude loop (desired pitch angle and desired roll angle θ d ) is calculated by the backstepping sliding mode controller of the position loop. The controllers of the two loops are solved to obtain four control variables for the input of the system model. According to the output of the system model, two high-order disturbance observers are designed for the attitude loop and the position loop respectively, which are used to estimate the external unknown disturbance, and The estimated disturbance value is fe...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com