

Oiling robot visual guidance method based on images
A robot vision and vision-guided technology, applied in the field of industrial robots and visual servoing, can solve problems such as control failure, time-consuming, and poor real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] In order to make the object, technical solution and features of the present invention clearer, the present invention will be described in further detail below with reference to the accompanying drawings.
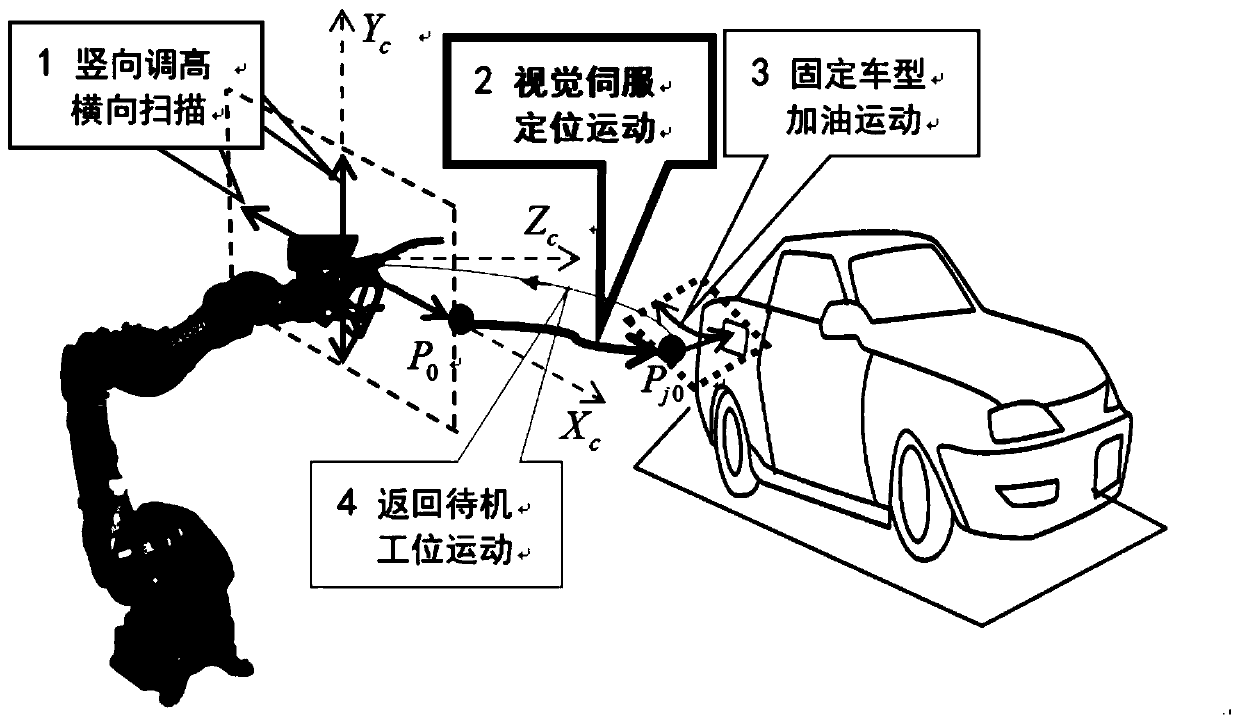
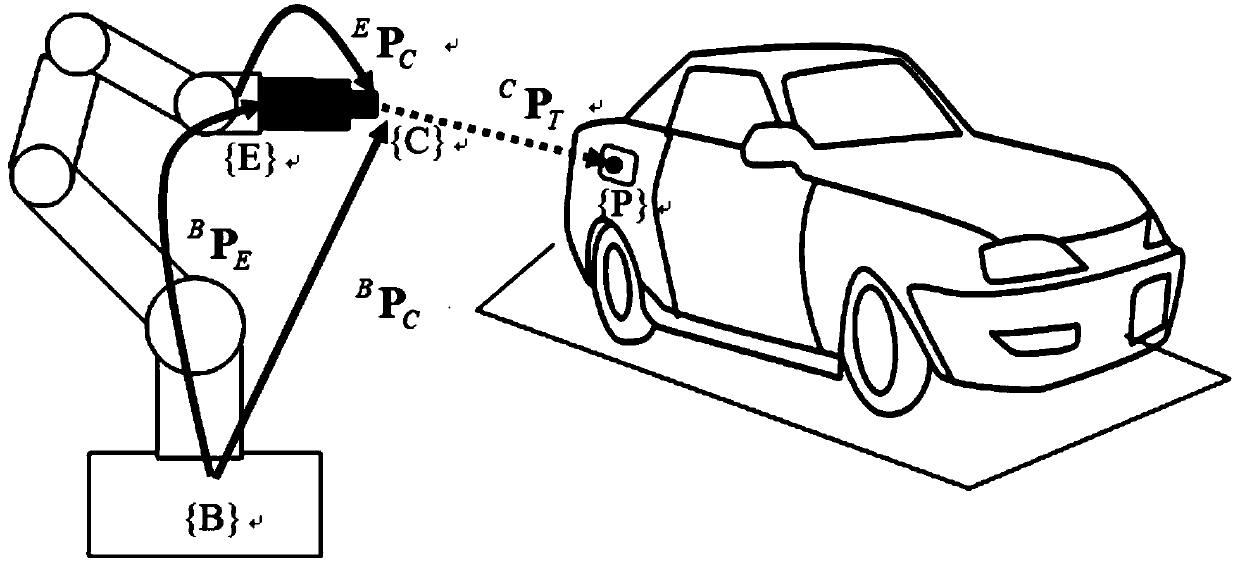
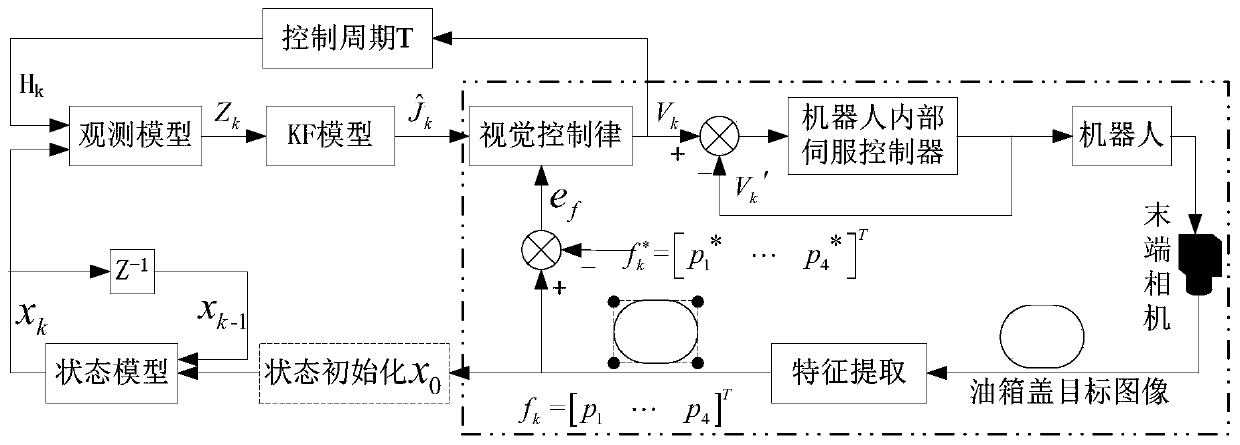
[0049] Such as Figure 1 to Figure 3 As shown, the present invention provides a related method of uncalibrated visual guidance control based on KF estimated image Jacobian matrix during the movement of refueling robot, including the following steps:
[0050] (1) System initialization: After the refueling robot finds the target features, it performs image Jacobian matrix initialization estimation based on the results obtained from the linear camera calibration model Get the initialization state vector X 0 .
[0051] (2) Calculate the observation matrix: Calculate the observation matrix H based on the control variable V(k-1) in the previous step k-1 ,
[0052] (3) Update state vector: from step k-1 to step k, state vector X k and the output vector Z k Update calc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More