Two-dimensional scanning wide-format imaging platform scanning control method
A two-dimensional scanning and scanning control technology, applied in the direction of feedback control, electric speed/acceleration control, etc., can solve problems such as unfavorable image processing and complex algorithms, and achieve the effect of simple calculation and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
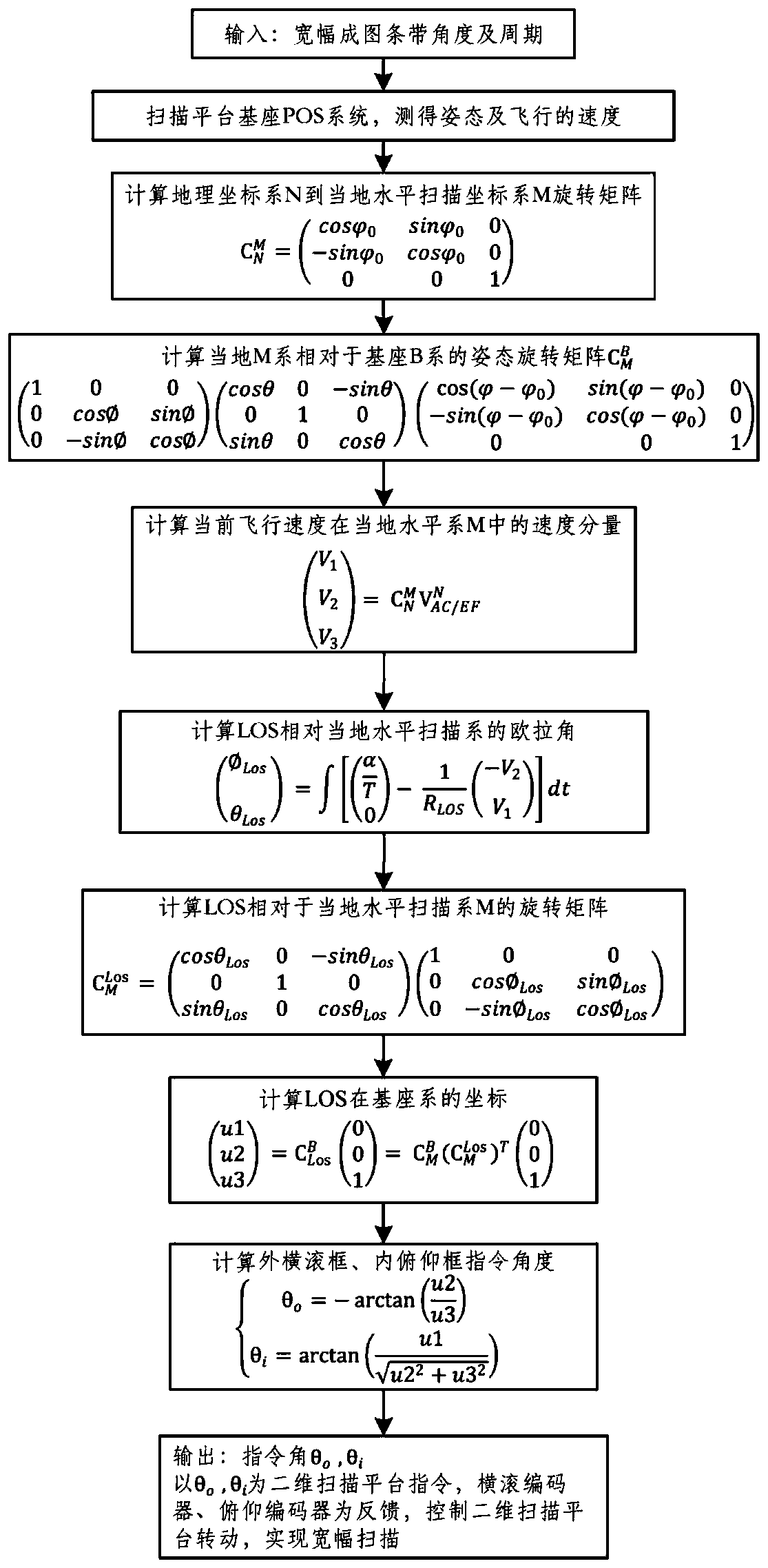
[0024] Embodiment one, see figure 1 :
[0025] 1) Assuming that the wide scanning angle is -50°~+10°, and the period of each scanning strip is 3s, the scanning angular rate can be calculated as
[0026]
[0027] 2) The local horizontal scanning coordinate system M is perpendicular to the scanning strip, and the yaw angle of the local horizontal scanning coordinate system M is taken is the initial yaw angle;
[0028] 3) The first scanning strip starts, t=0, the initial value of the rolling Euler angle Initial value of pitch Euler angle θ Los = 0°, ω FOV Take it as +20° / s;
[0029] 4) Take the sampling time Δt s = 100ms, every 100ms synchronously collects the output data of the POS system installed on the base of the two-dimensional scanning stable platform, including the yaw angle Pitch angle θ, roll angle Northeast velocity vector And the data R measured by the laser rangefinder in the pitch inner frame LOS ;
[0030] 5) According to the initial yaw angle ...
Embodiment 2
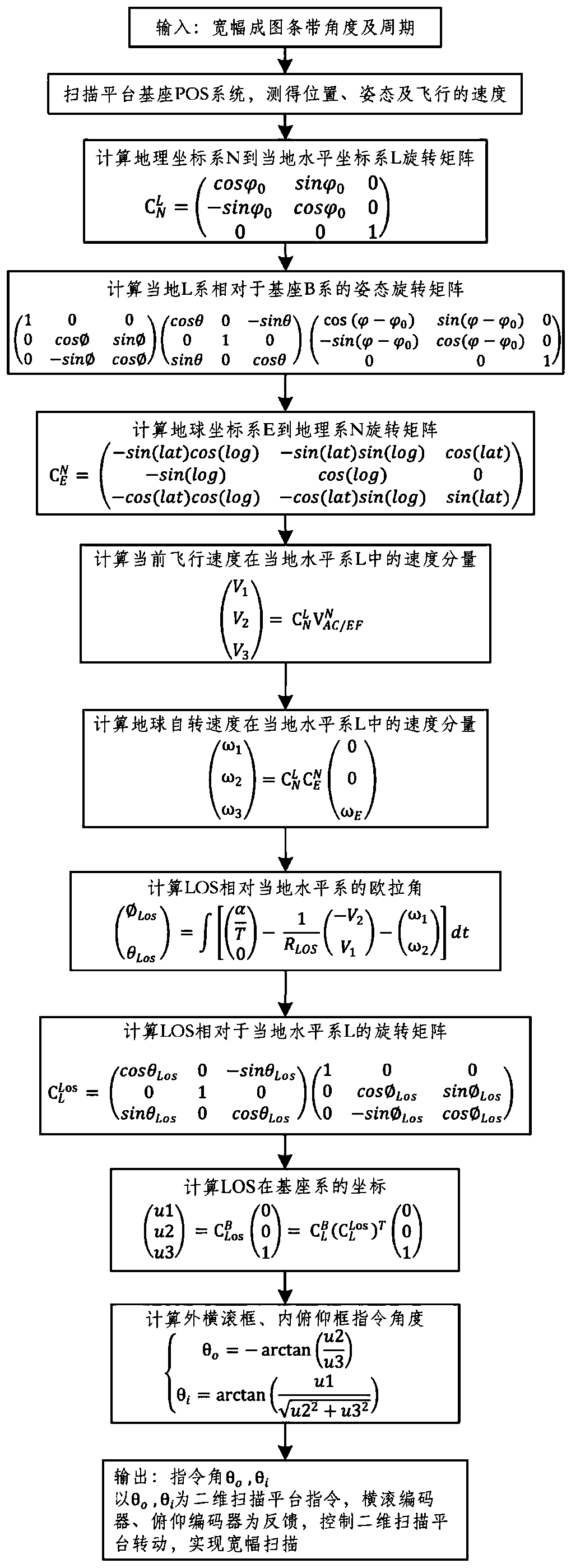
[0048] Embodiment two, see figure 2 :
[0049] 1) Assuming that the wide scanning angle is -50°~+10°, and the period of each scanning strip is 3s, the scanning angular rate can be calculated as
[0050]
[0051] 2) The first scanning strip starts, t=0, the initial value of the rolling Euler angle Initial value of pitch Euler angle θ Los = 0°, ω FOV Take it as +20° / s.
[0052] 3) Take the sampling time Δt s = 100ms, synchronously collect the position and attitude data output by the POS system installed on the base of the two-dimensional scanning stable platform every 100ms, including the yaw angle Pitch angle θ, roll angle Northeast velocity vector Longitude log, latitude lat, altitude h, and data R measured by the laser rangefinder in the pitch inner frame LOS .
[0053] 4) According to the initial yaw angle Calculate the transformation matrix from the geographic coordinate system N to the local horizontal coordinate system L
[0054]
[0055] 5) Calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com