

Uncertain parameter interference suppression method for LCL filter grid-connected inverter
A filter parameter and interference suppression technology, applied in the direction of output power conversion devices, electrical components, etc., can solve the problems of grid impedance waveform, damage reduction, etc., and achieve the effect of a robust current control method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
[0072] according to figure 1 As shown in the flow chart, the present invention provides an uncertain parameter interference suppression method for an LCL filter grid-connected inverter, comprising the following steps:
[0073] Step 1: Set the LCL filter parameters, simplify the third-order LCL filter into a first-order system, and establish the transfer function of the control system based on time-delay control;
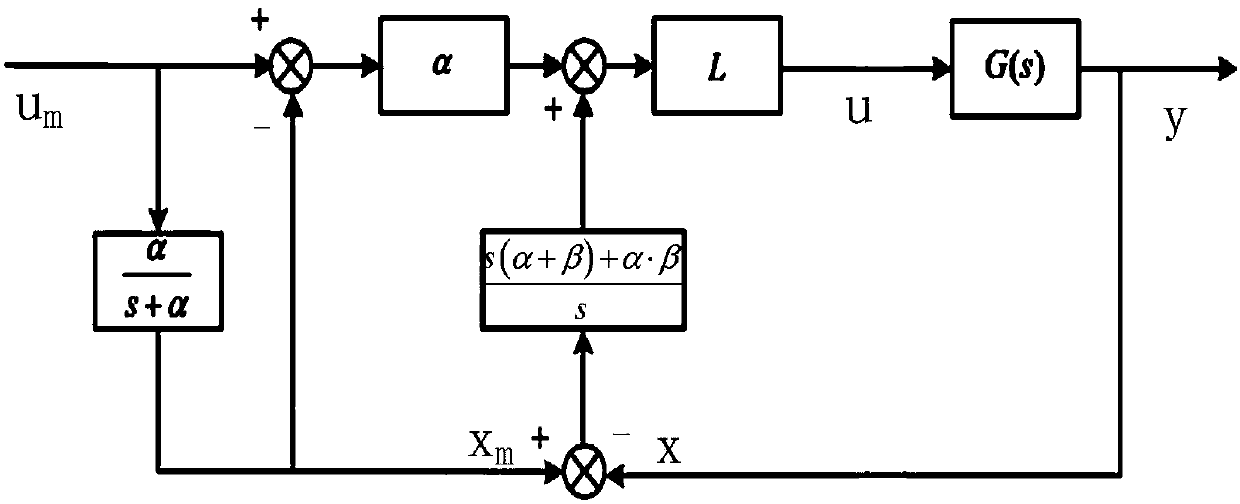
[0074] Step 2: According to the mathematical model of the control system based on time-delay control, determine the set point tracking response, establish the state equation corresponding to the expected reference model, and obtain the preliminary input expression according to the state equation corresponding to the expected reference model;
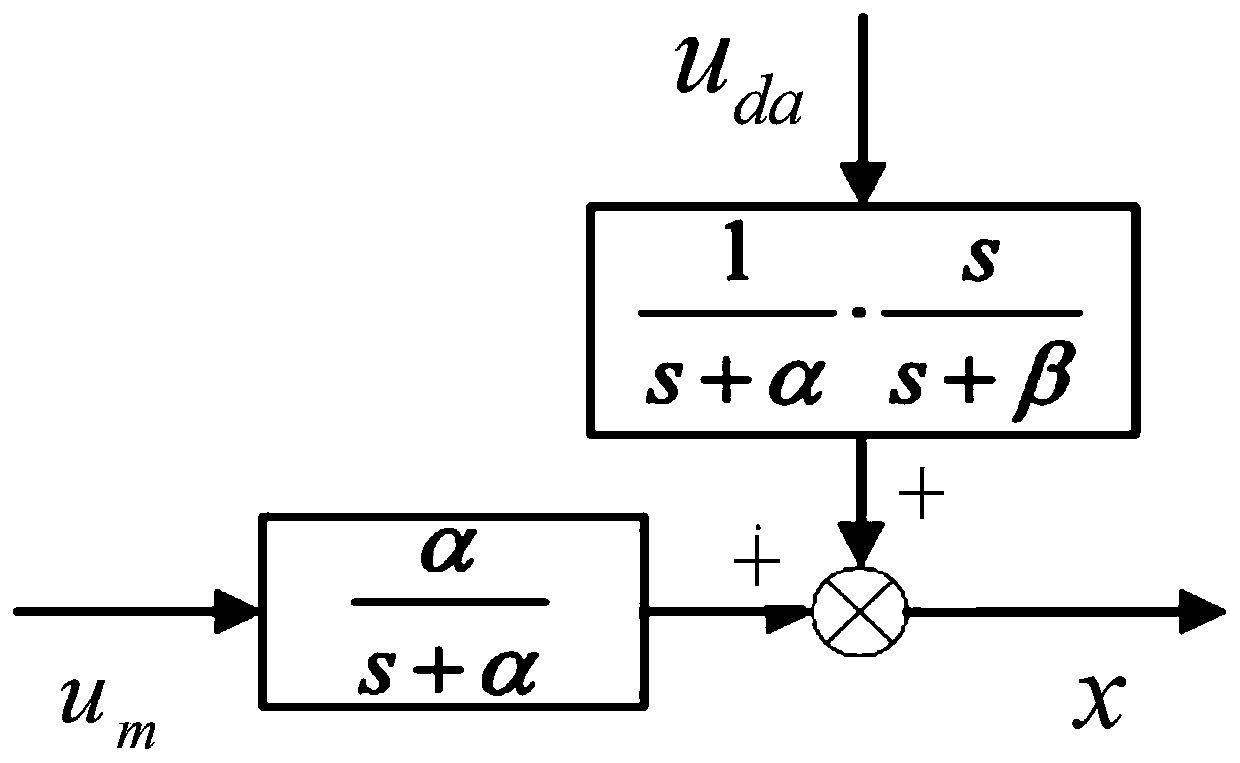
[0075] Step 3: Introduce a filter for estimating uncertainty and interference, and independently design it in the frequency domain to obtain the interference function in the frequency domain;
[0076] Step 4: By performing Lap...
specific Embodiment 2
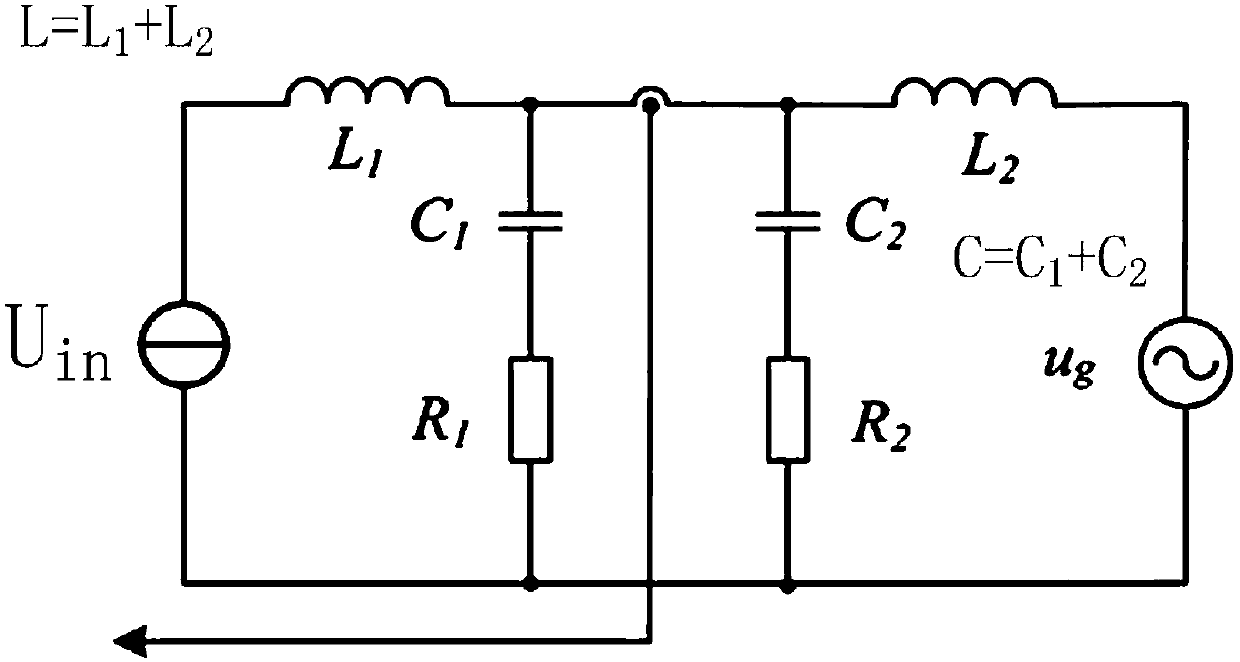
[0118] Step one, combine figure 1 , by setting the parameters reasonably, the third-order LCL filter is simplified into a first-order system, and based on this, the mathematical model of the control system obtained by improving the traditional time-delay control is established. At this time, the circuit structure becomes LCCL, the original filter capacitor C is split into C1 and C2, and the feedback variable is changed from the grid-connected current to the current i12 between the parallel circuits. For the convenience of analysis, it is advisable to define L=L1+L2, L 1 =λL,L 2 =(1-λ)L,C=C 1 +C 2 ,
[0119] Step 2: Determine the setpoint tracking response from the reference model, and the state equation corresponding to the expected reference model can be expressed as: Among them, X m (t), U m (t), A m , B m Denote the desired state variable, desired control input, desired state matrix, and desired control matrix, respectively.
[0120] Step three, introducing a f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More