

Road vision detection method combined with laser point cloud data
A technology of laser point cloud data and point cloud data, applied in neural learning methods, instruments, biological neural network models, etc., can solve the problems of unable to achieve information complementarity, unable to improve road detection accuracy and robustness, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
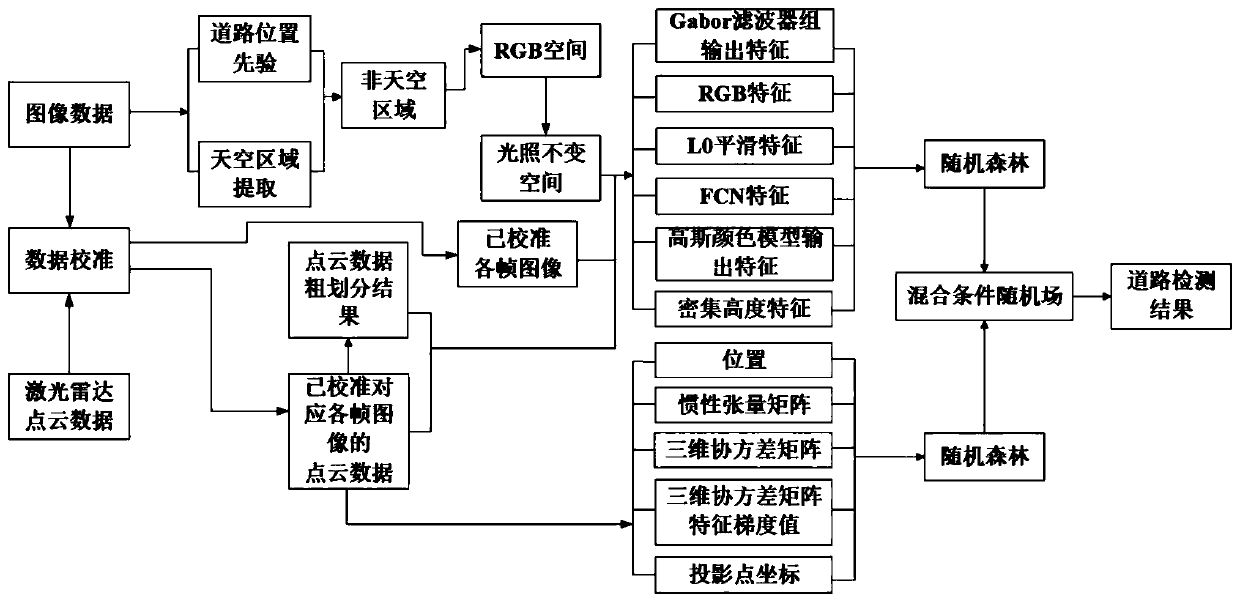
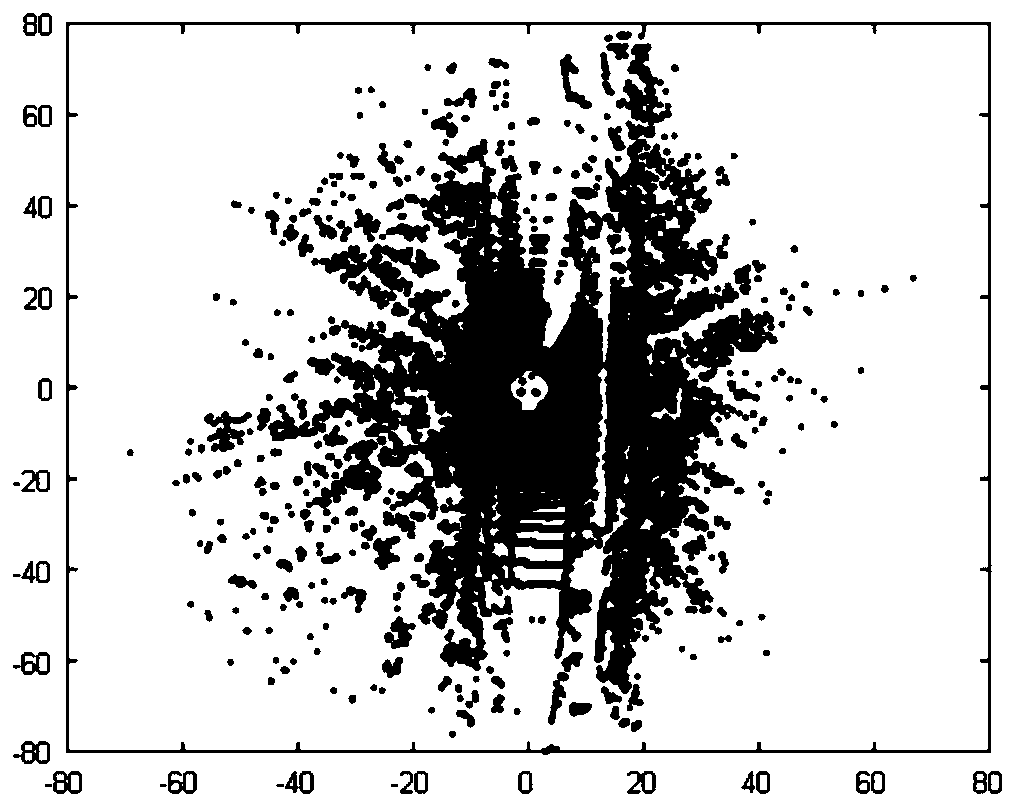
[0176] According to the spatial relationship between point cloud data and image data, the point cloud data acquired by the laser radar and the image data acquired by the camera are jointly calibrated to obtain the data-level fusion of point cloud data and image data, in which the image data includes a frame image, such as figure 2 shown; corresponding figure 2 The uncalibrated point cloud data, such as image 3 shown;
[0177] Road division is performed on each frame image in the image data to obtain a rough division image of the area where the road is located, such as Figure 4 As shown, the coarsely divided image is converted to the illumination invariant space, and the illumination invariant space image is obtained;
[0178] According to M estimation sample consistency, plane fitting is performed on the point cloud data corresponding to each frame image after data level fusion, and the rough division result of point cloud data on the road area is obtained, as shown in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More