

Aircraft monocular vision scale estimation method and device, aircraft navigation system and aircraft
A technology of monocular vision and scale estimation, which is applied in the field of aircraft and can solve problems such as inability to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The technical solution of the present disclosure will be described in further detail below with reference to the drawings and embodiments.
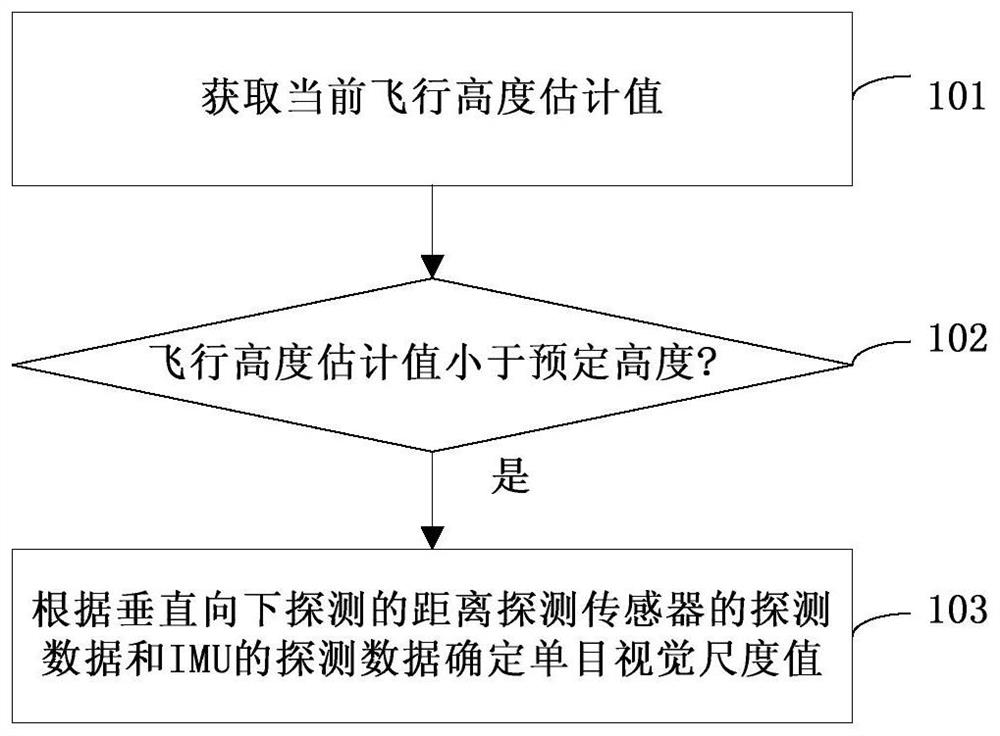
[0044] The flow chart of an embodiment of the aircraft monocular vision scale estimation method of the present disclosure is as follows figure 1 shown.
[0045] In step 101, an estimated current flight height is acquired. In an embodiment, the estimated value of the flying height may be obtained by a distance detection sensor installed on the aircraft with a detection direction vertically downward. When the flight height exceeds the measurement range of the sensor and the detection cannot be performed, the estimated value of the flight height may be a predetermined threshold value by default, and the predetermined threshold value is higher than the predetermined height in step 102 .
[0046] In step 102, the flight altitude estimate is compared to a predetermined altitude. Step 103 is executed when the estimated flight height is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More