

Automatic control device, method for excavator bucket trajectory and computer readable storage medium
A technology for excavators and buckets, applied in the field of automatic control, can solve problems such as speed interference and difficulty in coordinated movement, and achieve the effects of improving frequency band and response speed, good consistency, and strong engineering practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
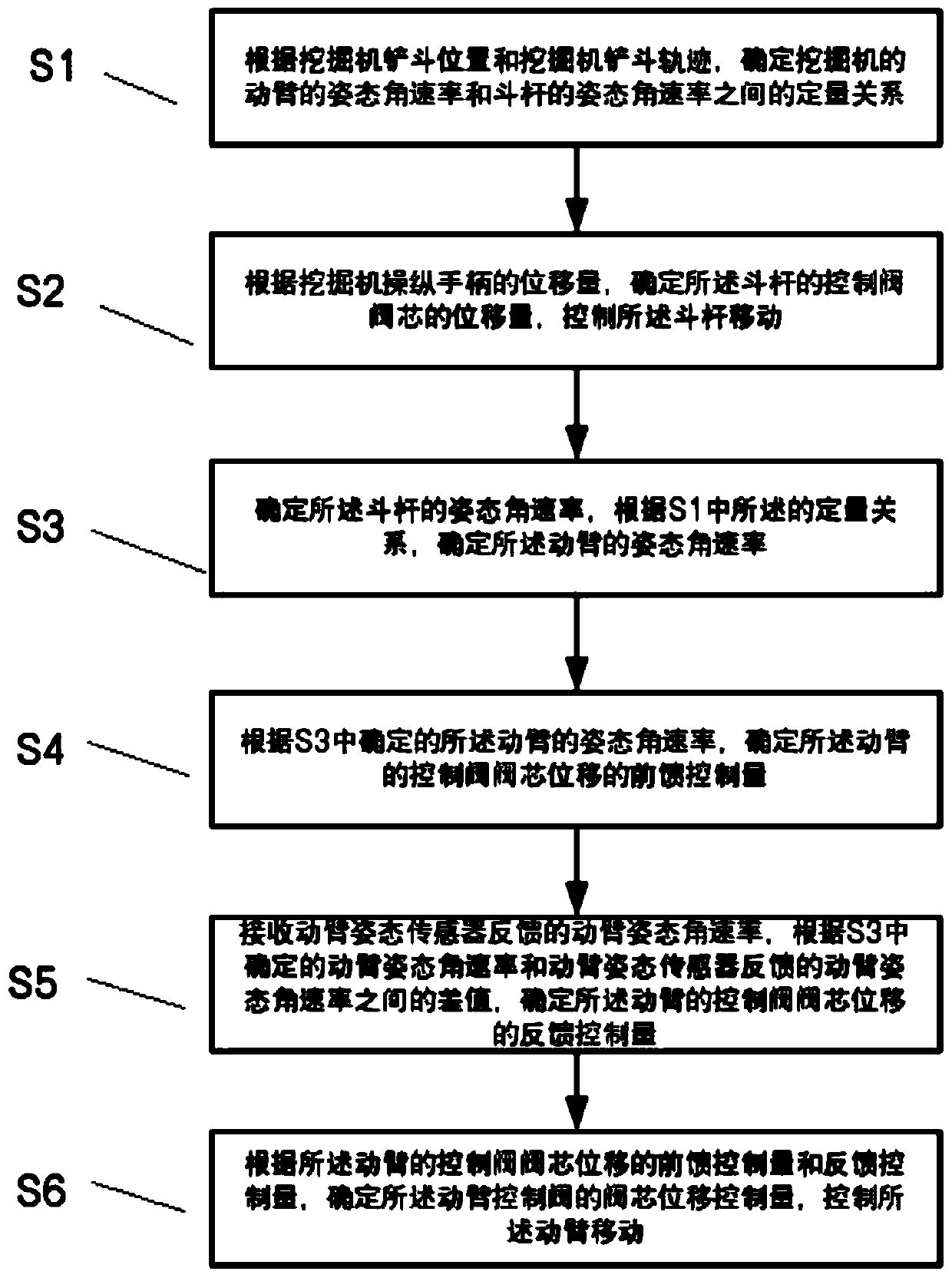
[0040] figure 1 As shown, it is a flow chart of an embodiment of an excavator bucket trajectory automatic control method of the present invention, including:
[0041] Step S1: According to the position of the excavator bucket and the trajectory of the excavator bucket, determine the quantitative relationship between the attitude angular rate of the excavator's boom and the attitude angular rate of the arm;
[0042] Step S2: Determine the displacement of the control valve spool of the stick according to the displacement of the joystick of the excavator, and control the movement of the stick;
[0043] Step S3: Determine the attitude angular rate of the stick, and determine the attitude angular rate of the boom according to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More