

UAV reconnaissance flight path planning method for line target
A track planning, unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicle reconnaissance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
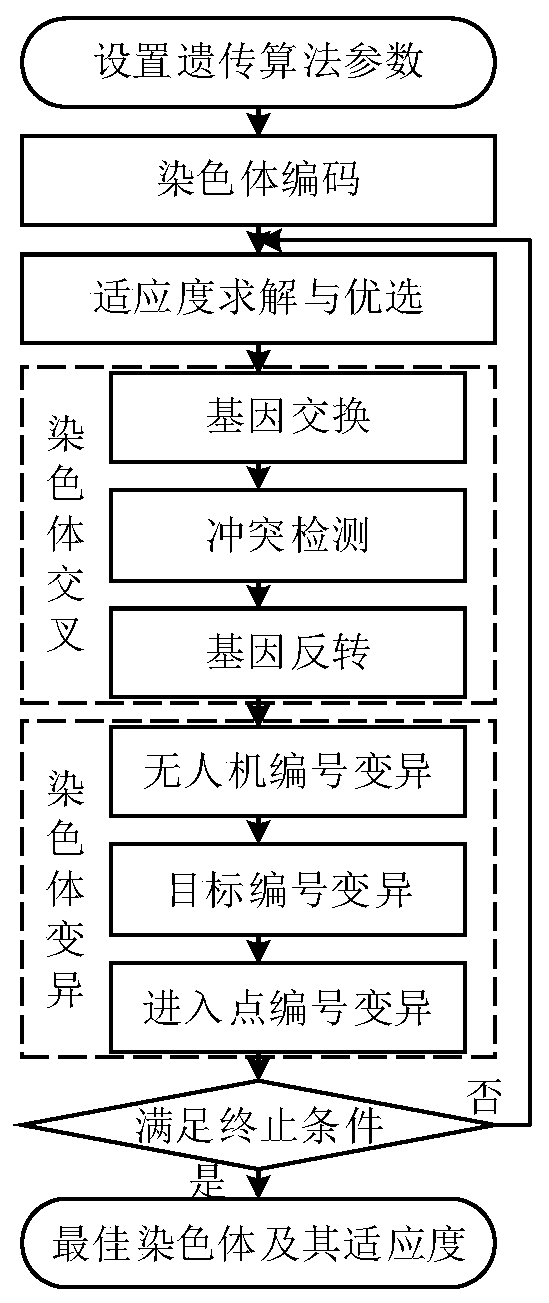
[0076] The present invention will be further explained below in conjunction with the accompanying drawings. The present invention is oriented to the line target UAV reconnaissance track planning method, refer to the flow chart figure 1 . Include the following steps:
[0077] Step 1: Establish a trajectory planning model for multi-UAV cooperative reconnaissance of multi-line target tasks;
[0078] Assuming there are m drones and N line targets, the number of line targets that the i-th drone needs to scout is n i .
[0079] (101) Calculate the distance L of the i-th UAV to the assigned first line target i1 :
[0080] L i1 =d((x i ,y i ),(x i11 ,y i11 )) (1)
[0081] Among them, the coordinates (x i ,y i ) represents the position of the i-th UAV, and the coordinates (x i11 ,y i11 ) represents the entry point position of the i-th UAV going to the assigned first line target; d(a,b) represents the geometric distance between point a and point b;
[0082] (102) Calcula...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More