Fusion method and device for yaw angle and aerial vehicle
A technology of yaw angle and aircraft, applied in the field of aircraft, can solve the problem of large error in primary complementary filtering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
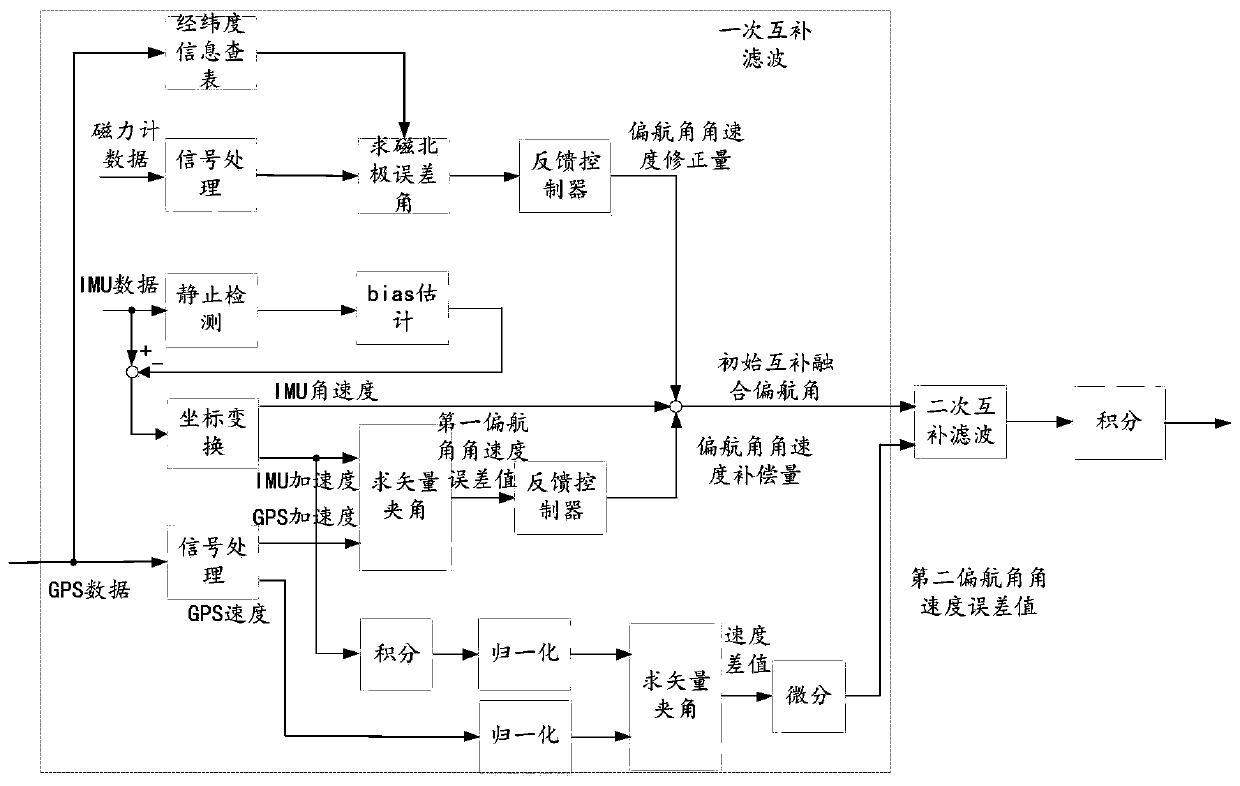
[0141] see figure 2 , figure 2 It is a functional block diagram of a yaw angle fusion method provided by an embodiment of the present invention;
[0142] Such as figure 2 As shown, by obtaining GPS data, magnetometer data and IMU data, and according to the GPS data, the longitude and latitude information look-up table is performed, and the magnetometer data is signal-processed to obtain the magnetic north pole error angle, and the magnetic north pole The error angle generates the yaw angular velocity correction amount through the feedback of the feedback controller, and obtains the IMU angular velocity through the IMU data, obtains the yaw angular velocity compensation amount through the GPS data and the IMU data, and corrects the yaw angular velocity Quantity, IMU angular velocity, and yaw angular velocity compensation are fused to generate an initial complementary fusion yaw angle, and by integrating the IMU acceleration and normalizing the integrated velocity, the GPS ...
Embodiment 2
[0233] see Figure 11 , Figure 11 It is a schematic diagram of a yaw angle fusion device provided by an embodiment of the present invention;
[0234] Such as Figure 11 As shown, the fusion device 110 of the yaw angle is applied to an aircraft, specifically, the fusion device 110 of the yaw angle may be a flight controller of the aircraft, and the device includes:
[0235] Obtaining module 111, for obtaining magnetometer data, IMU data, GPS data, described IMU data comprises IMU acceleration information and IMU angular velocity information, and described GPS data comprises GPS velocity information and GPS acceleration information;
[0236] A yaw angular velocity correction amount module 112, configured to determine a yaw angular velocity correction amount according to the GPS data and the magnetometer data;
[0237] The first yaw rate error value module 113 is used to determine the first yaw rate error value according to the IMU acceleration information and the GPS acceler...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More