

Human-computer safety interaction system and method of clinical lithotomy position target particle implantation robot
An interactive system and robot technology, applied in the field of clinical lithotomy position targeted particle implantation robot human-machine safety interactive system, can solve the problems of hand-eye fatigue, difficulty in achieving precise treatment of malignant tumors, and lack of independent and safe interactive treatment methods, etc. Achieve the effect of realizing safe interaction, ensuring stability and security
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below.
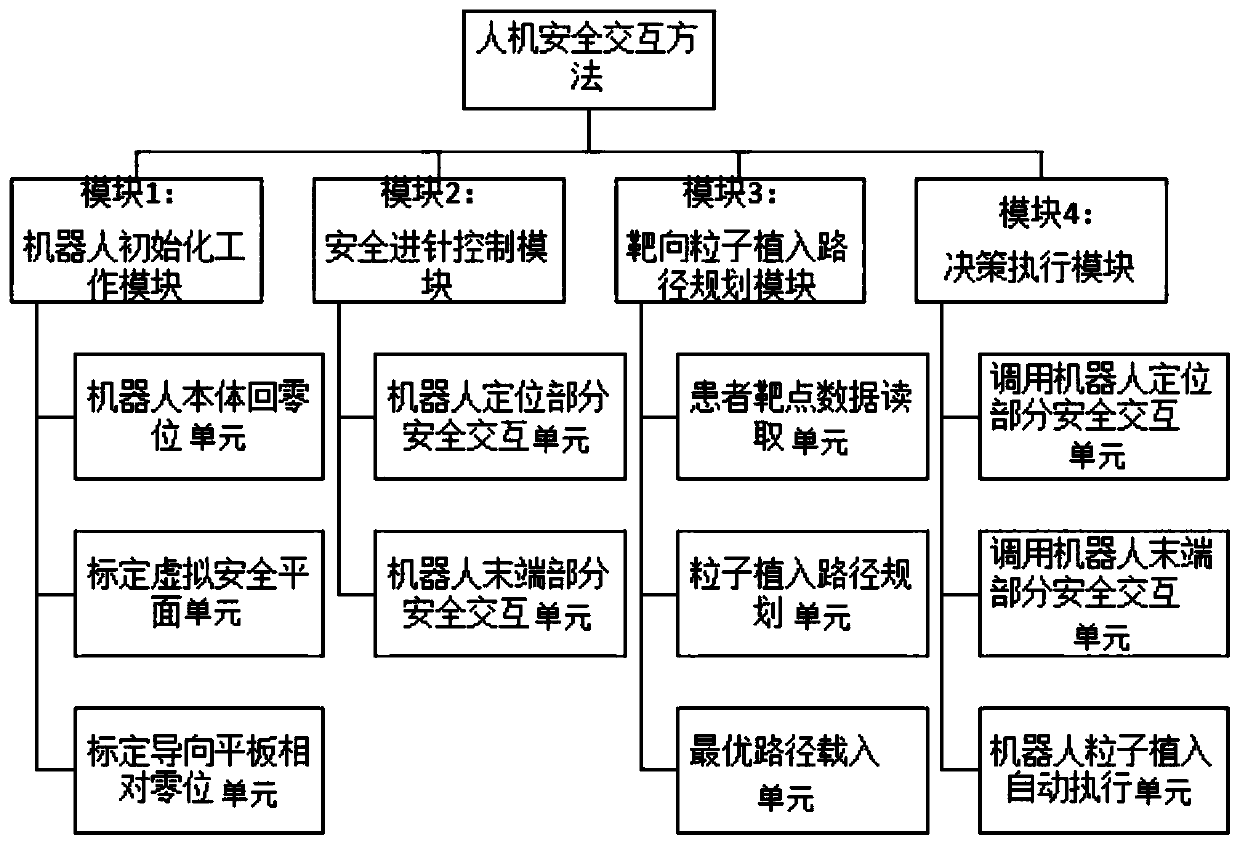
[0046] like Figure 1 to Figure 4 As shown, the human-computer safety interaction system of the human-machine safety interaction system for the targeted particle implantation robot in the clinical lithotomy position includes:
[0047]The robot initialization working module performs initial positioning mechanism on the robot body to improve the positioning accuracy of the robot body;
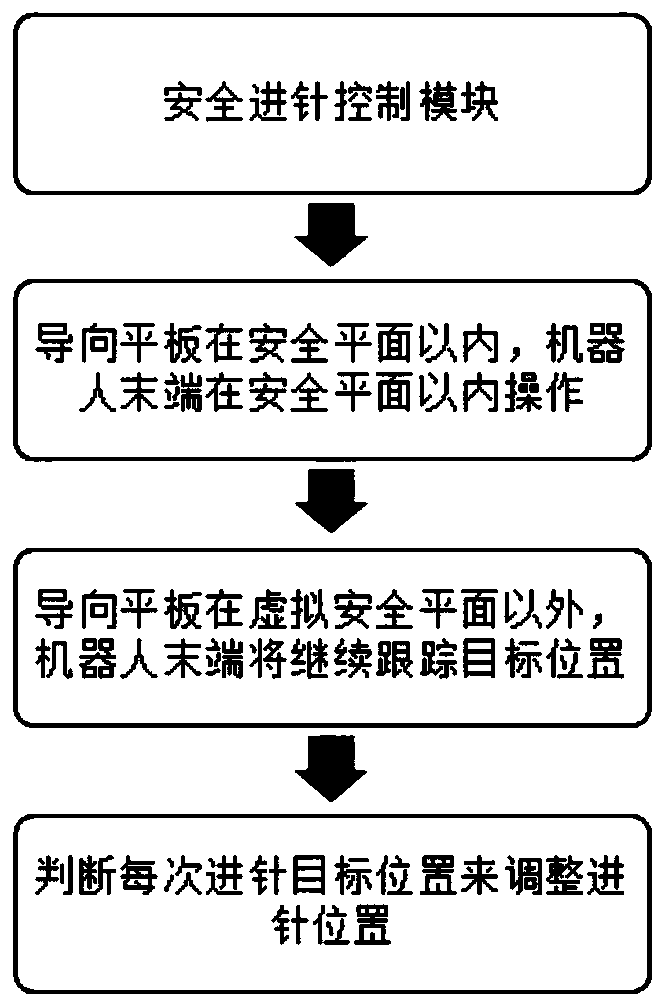
[0048] The safe needle insertion control module cooperates with the robot initialization module to accurately position the robot body;
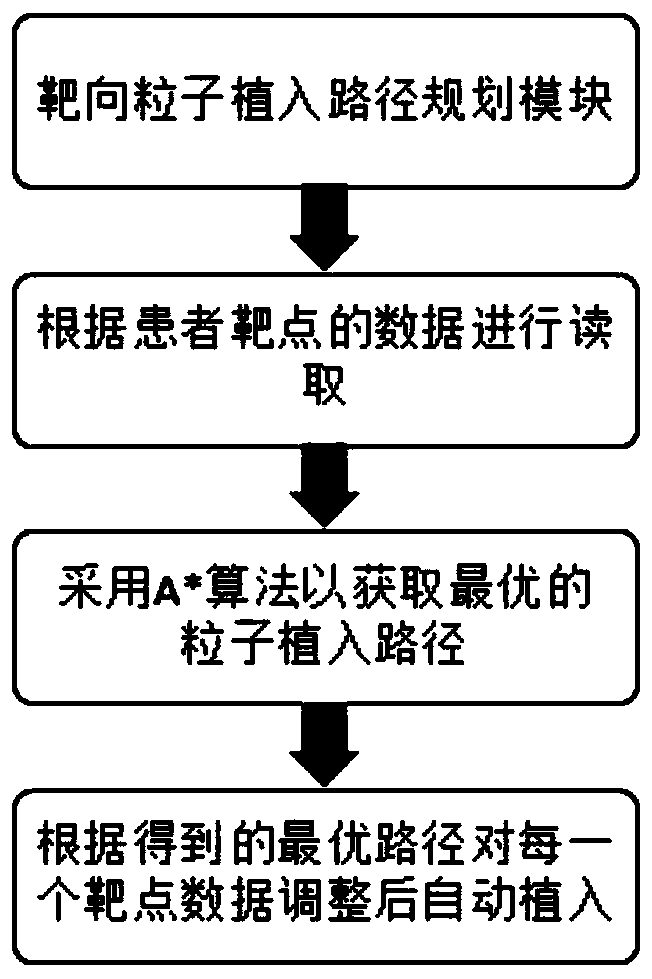
[0049] The targeted particle implantation path planning module cooperates with the safe needle insertion control module and the robot initialization module to plan the optimal path for the targeted particle;
[0050] The decision-making execution module cooperates with ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More