

Mobile robot navigation map generation method based on ORB_SLAM2
A mobile robot and navigation map technology, which is applied in the field of visual SLAM and map creation, can solve the problems that the 3D environment is not well detected, cannot provide comprehensive environmental information, and the mobile robot has high real-time performance, so as to achieve real-time path planning and navigation , reduce memory size, reduce time effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
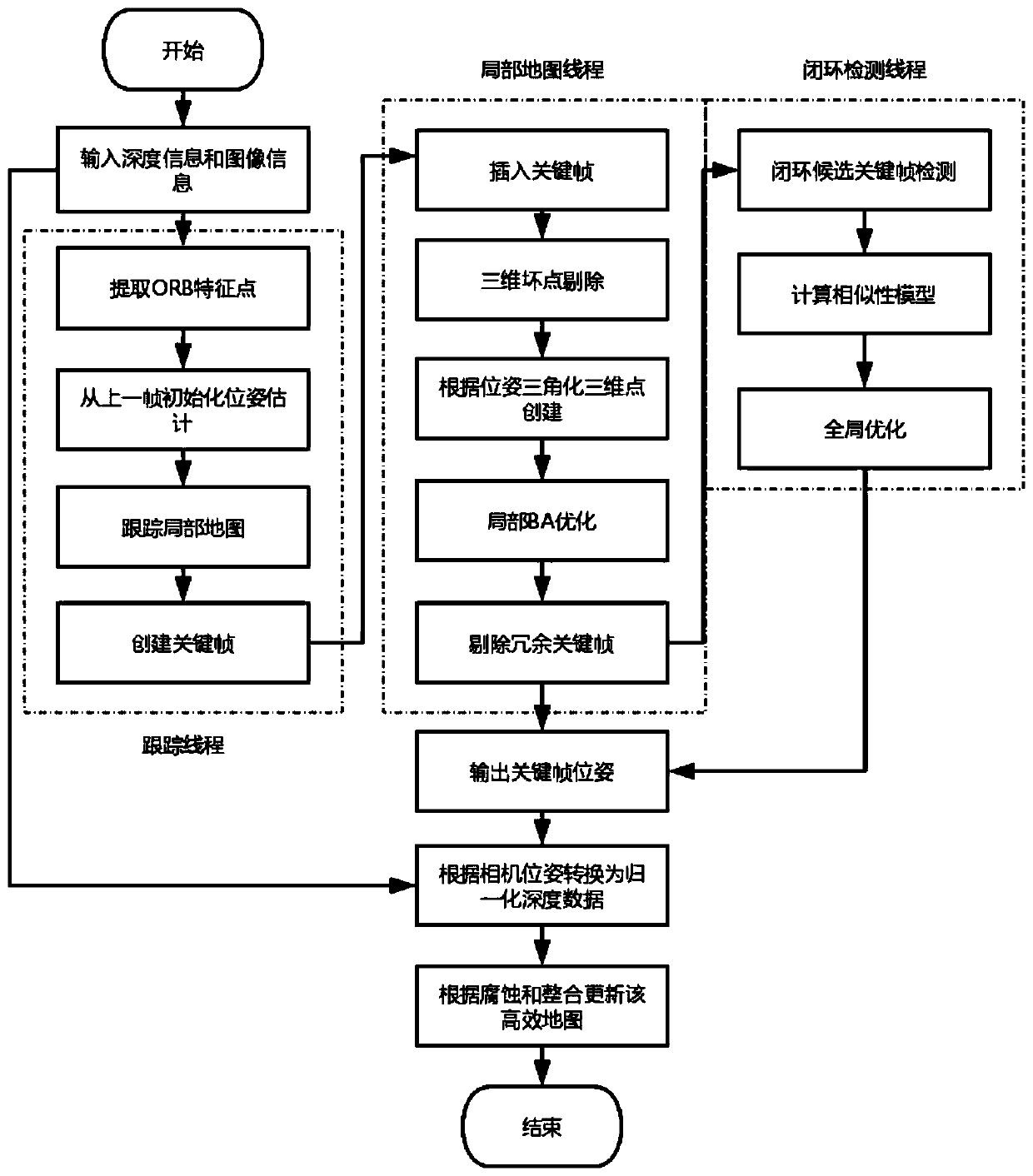
[0042] This embodiment discloses a specific implementation process of a mobile robot navigation map generation method based on ORB_SLAM2, using a ROS operating platform (Robot Operating System) to provide communication and data transmission between nodes. First start the Kinect v2 acquisition data node, and publish Kinect v2 sensor color image information and depth information messages through this node.
[0043] Subscribe to the message through the ORB_SLAM2 node, and use the ORB_SLAM2 algorithm to estimate the pose of the mobile robot. The ORB_SLAM2 algorithm uses ORB feature points to extract feature points, and uses BA optimization to optimize the pose of the mobile robot and The bag model performs loopback detection to avoid error accumulation, which is mainly divided into three threads:
[0044] 1) Tracking thread: Use ORB feature extraction to extract feature points from the collected images. If the initialization operation has not been completed and the number of featu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More