Minimally invasive surgery mechanical arm used in LESS (laparo-endoscopic single site surgery) environment
A technique of minimally invasive surgery and laparoscopy, which is applied in the field of minimally invasive surgical medical devices and equipment, can solve the problems of difficult operation, high price, and unsuitable for widespread promotion, and achieve the effects of reducing patient trauma, low cost, and accelerating patient recovery
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
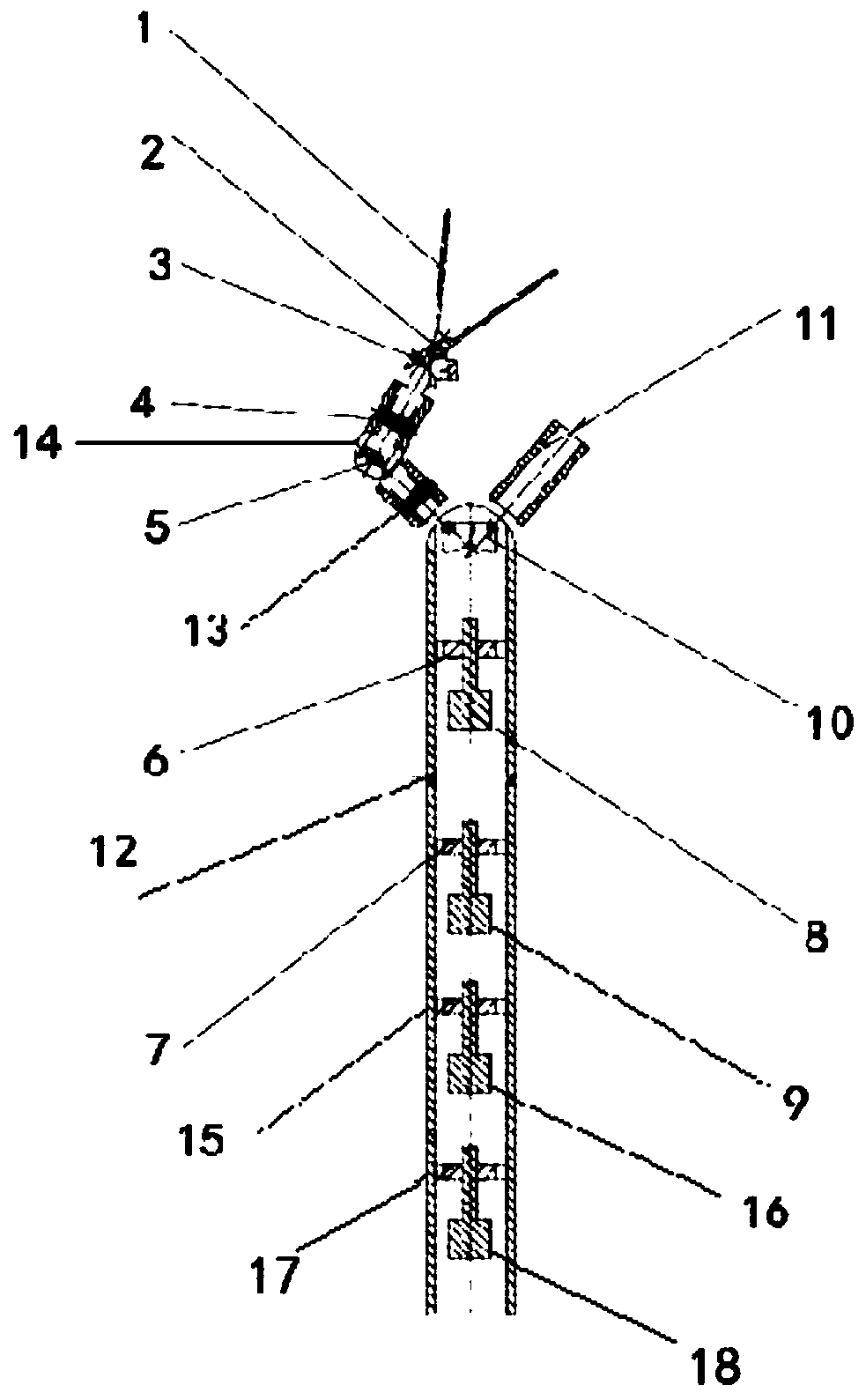
[0024] A minimally invasive surgical robotic arm used in a single-port laparoscopic environment, comprising an operating unit and a transmission unit 12; the transmission unit 12 is connected to the operation unit through a transmission wire set used to control the movement of the operation unit; the transmission wire set includes a clamp Joint transmission wire, upper arm transmission wire, lower arm transmission wire, hollow transmission wire;
[0025] The t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More