

A Gravity Compensation Method for Trimule Horizontal Hybrid Robot
A gravity compensation and robotics technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the position deviation of the end of the manipulator, achieve the effects of accurate compensation, flexible data collection, and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
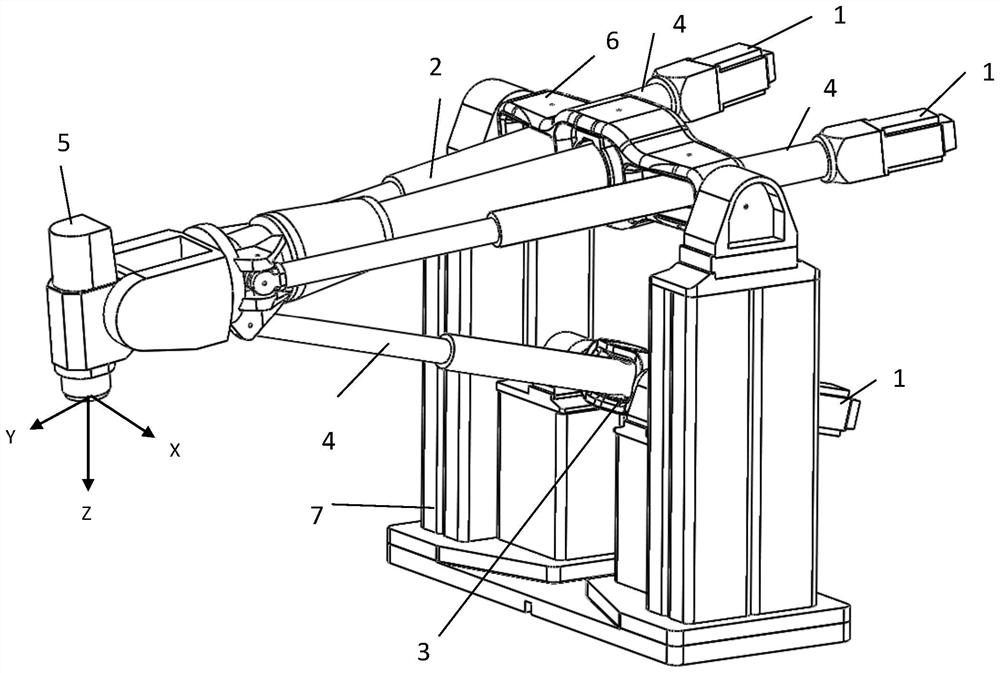
[0027] Since the parallel mechanism of the horizontal layout is greatly affected by its own gravity, it is reflected in the fact that the lead screw in the parallel part is bent and deformed due to the gravity of itself and the end during the elongation and shortening process under the drive of the motor, while the series swing head 5 can As a whole, the end position deviation caused by deformation can be compensated by controlling the driving motor 1 of the parallel part.
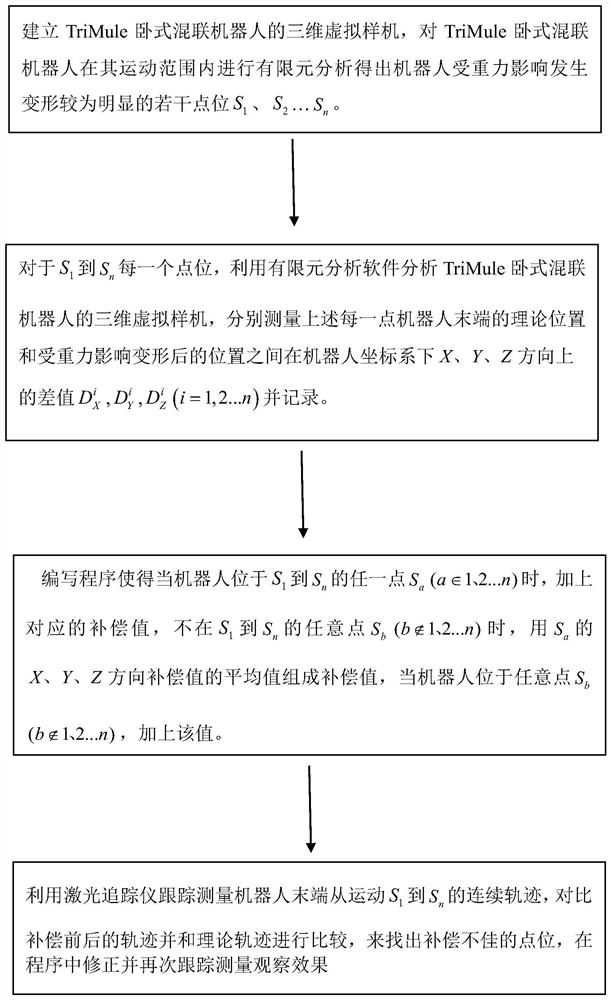
[0028] A kind of gravity compensation method for TriMule horizontal hybrid robot of the present invention as shown in the accompanying drawing based on above principle, comprises the following steps:
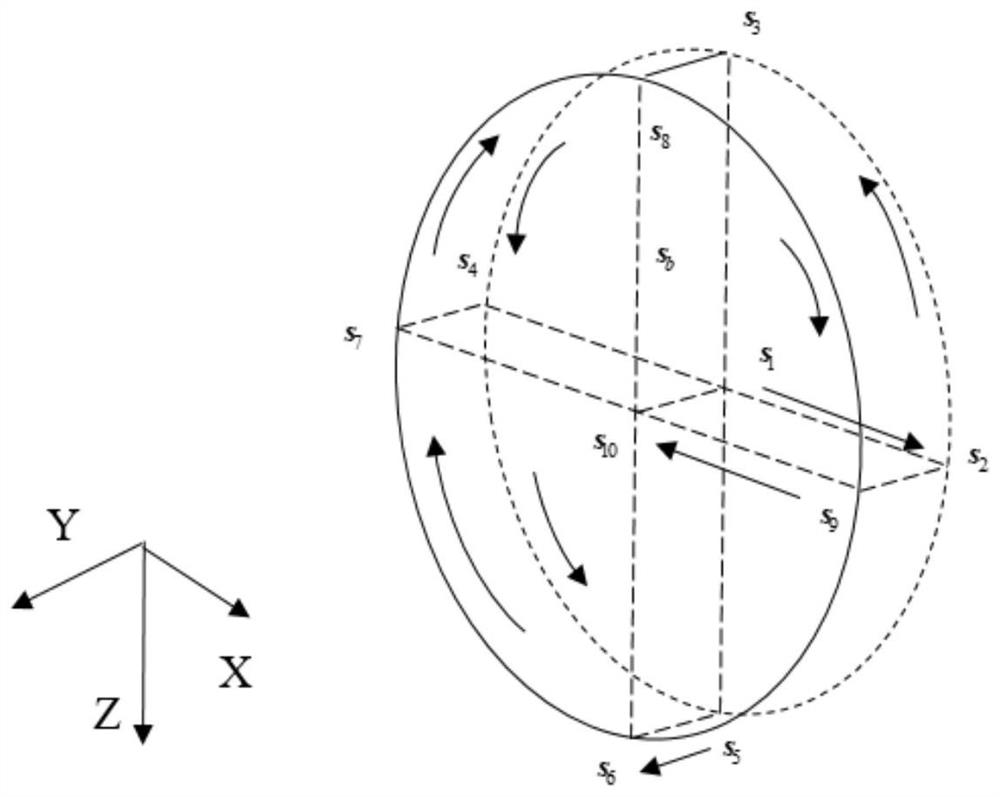
[0029] Step 1. Install the laser target ball 9 at the end 5 of the two-degree-of-freedom series swing head of the robot, and set the laser tracker 8 directly in front of the TriMule...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More