

Wind turbine generator active regulation method and method based on wind speed advance measurement
A technology of wind turbines and adjustment methods, which is applied in wind power generation, wind turbines, control of wind turbines, etc., and can solve the problems of increased fatigue load, shortened life of the pitch system, and insufficient performance of wind turbines, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0081] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments . Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
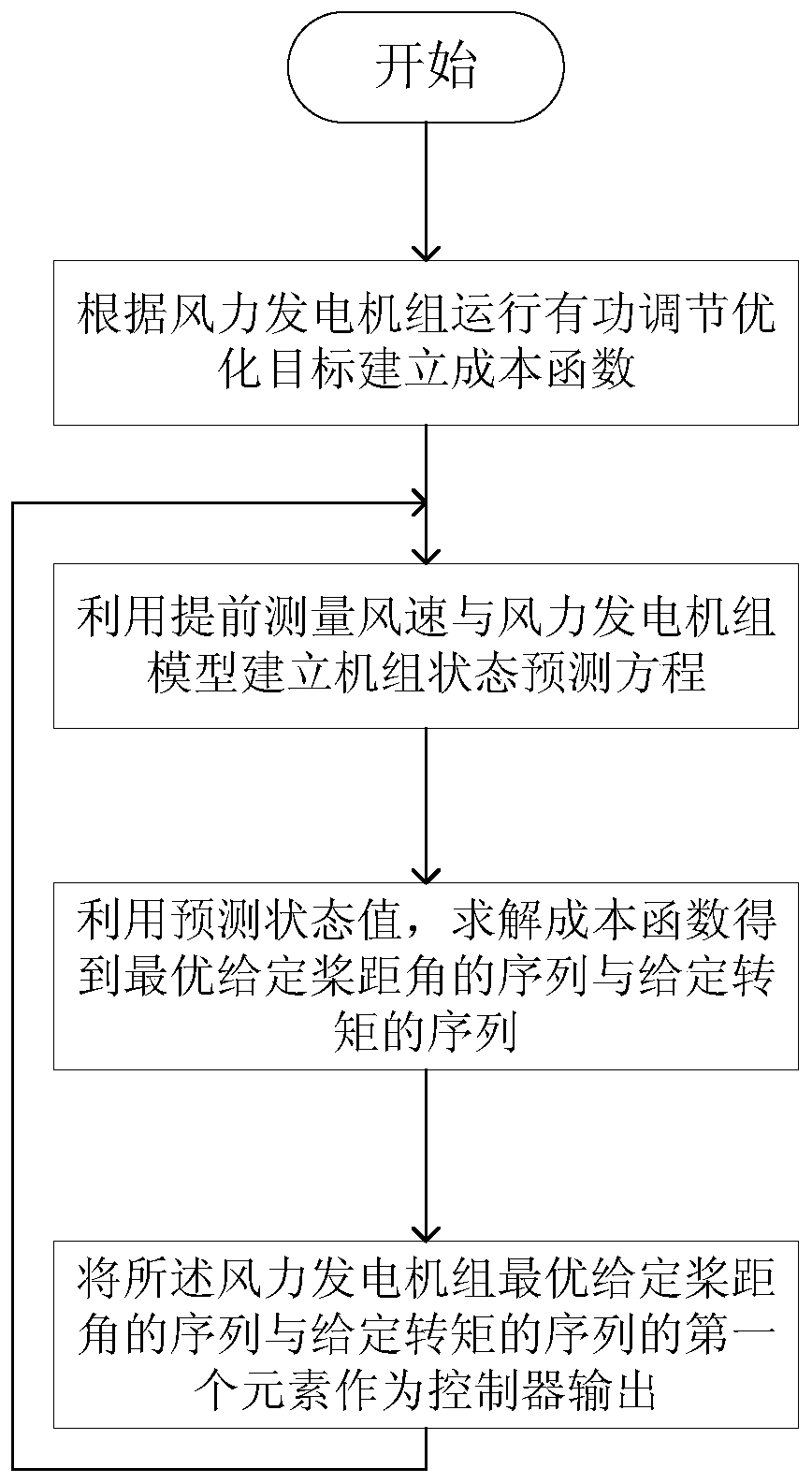
[0082] combine figure 1 , the active power control method of the variable-speed constant-frequency wind turbine set based on the wind speed measurement in advance to reduce the pitch action of the present invention includes the following steps:
[0083] In step 1, a cost function is established according to the optimization target of active power regulation of wind turbine operation.
[0084] Step 1-1, determine the target power P of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More