

A shape-controllable humanoid robot based on segmented skin
A robot and skinning technology, applied in the field of shape-controllable humanoid robots based on segmented skins, can solve the problems of unstable control, high return rate, poor fitting effect, etc. Control, control the effect of synchronization and coordination
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further described below in conjunction with drawings and embodiments.
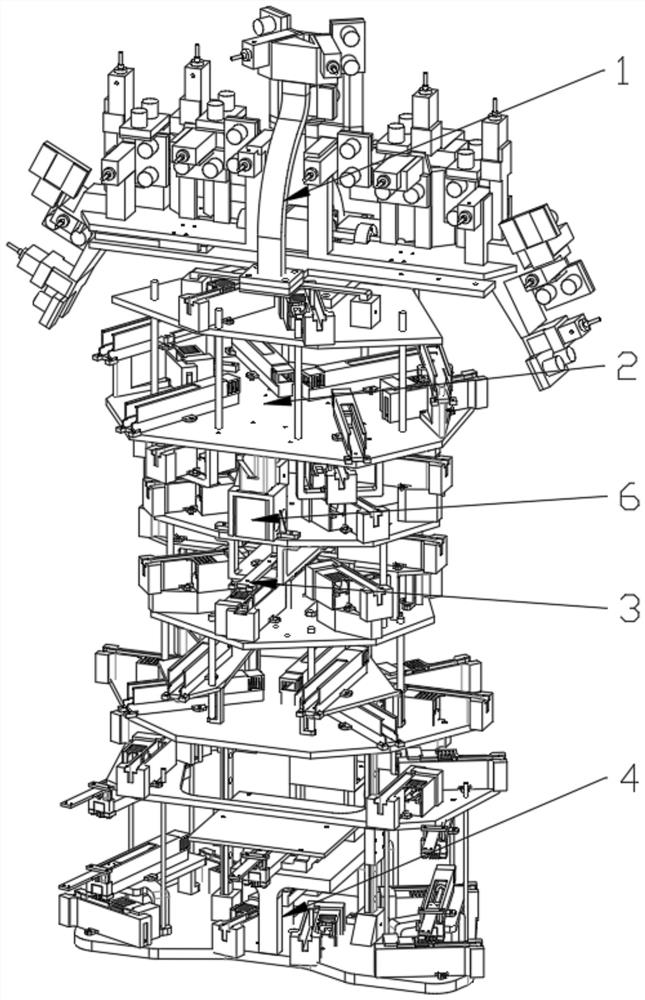
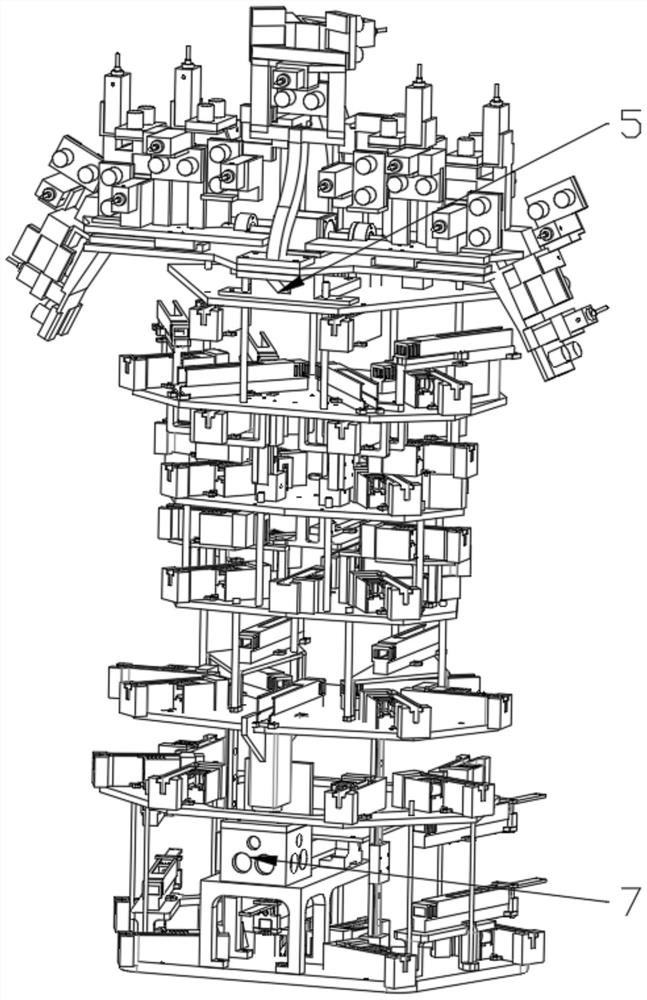
[0045] Such as figure 1 , figure 2 As shown, the waist-hip displacement adjustment support mechanism 7 is installed on the hip profiling module 4, and the waist profiling module 3 is installed on the waist-hip displacement adjustment support mechanism 7, which can follow the vertical push of the waist and hip displacement adjustment support mechanism 7. Moving up and down. A thoracolumbar displacement adjustment support mechanism 6 is installed between the waist profiling module 3 and the chest profiling module 2, so that the vertical distance between the chest profiling module 2 and the waist profiling module 3 is adjustable. The shoulder and neck profiling module 1 is installed on the chest profiling module 2 through the shoulder and chest supporting mechanism 5 .
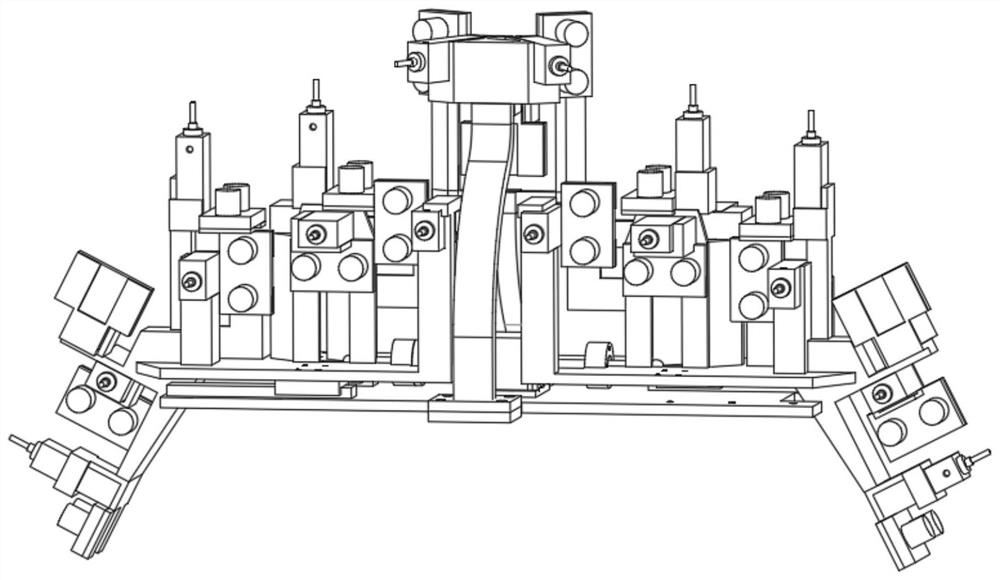
[0046] Such as image 3 , Figure 4 , Figure 5 Shown are the shoulder and neck profiling module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More