Face recognition method and system based on three-dimensional optimization sub-curved surface
A three-dimensional face and face recognition technology, applied in the field of face recognition, can solve the problems of low efficiency and low recognition accuracy, and achieve the effect of reducing the influence of interference factors, calculating quickly, and maintaining the performance of face recognition.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0056] like Figure 1-4 As shown, Embodiment 1 of the present disclosure provides a face recognition method based on a three-dimensional optimized sub-surface, which specifically includes the following aspects:
[0057] (1) Data collection and preprocessing
[0058] The data acquisition part uses video acquisition equipment including color and depth data to collect face information, and the equipment outputs color images and depth data at the same time, and can correspond pixel by pixel according to depth information. Any device that can collect texture and depth information can be used, including but not limited to laser scanners, structured light sensors, TOF (Time Of Flight, time of flight) cameras, etc.
[0059] This embodiment uses Prime Sense Carmine 1.09, an RGBD sensor based on structured light, which is characterized by an imaging distance of 0.35m-1.4m, a depth accuracy error of 1mm at 0.5m, and an output color image and depth image resolution of 640x480.
[0060] ...
Embodiment 2
[0104] Embodiment 2 of the present disclosure provides a face recognition system based on a three-dimensional optimized sub-surface, including:
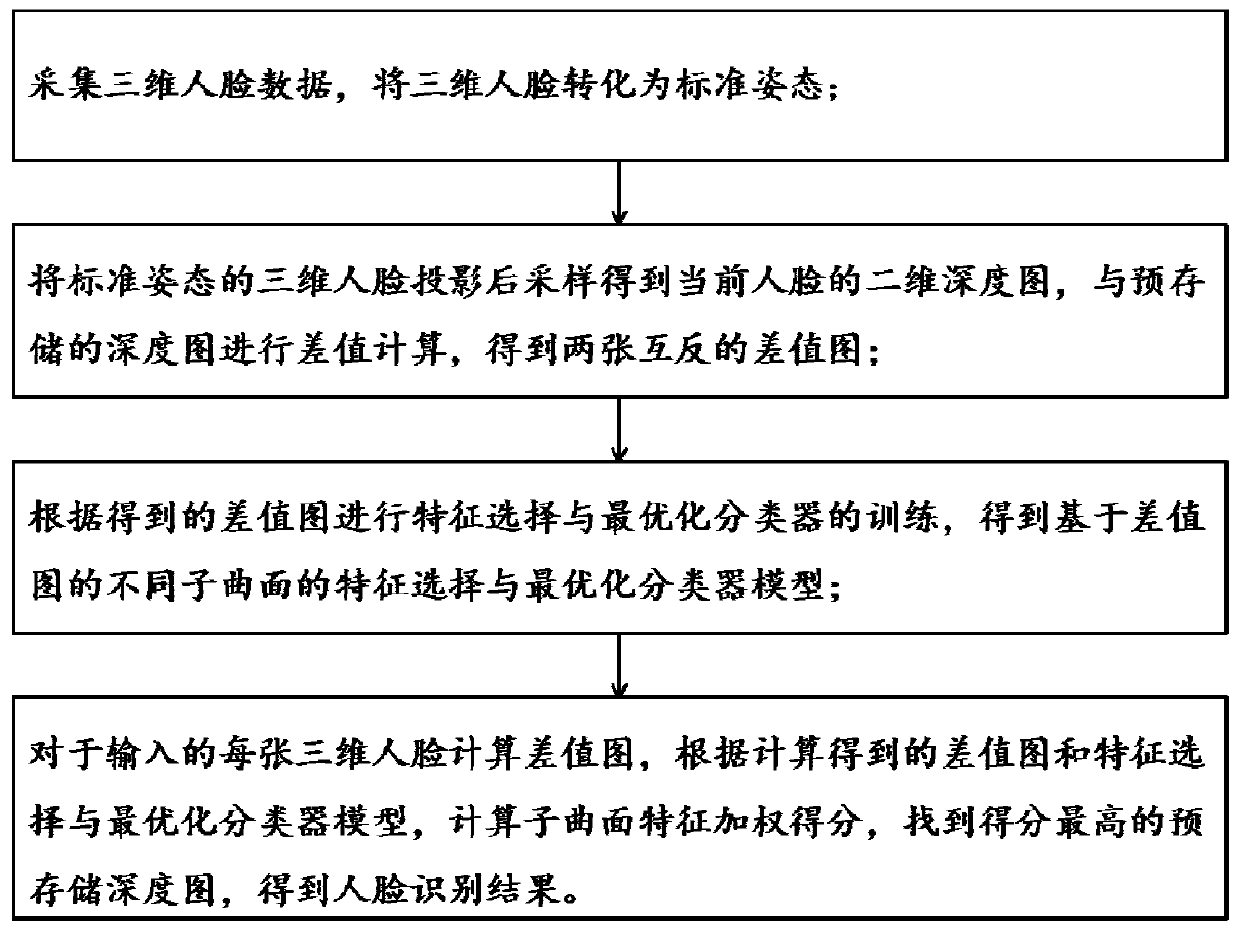
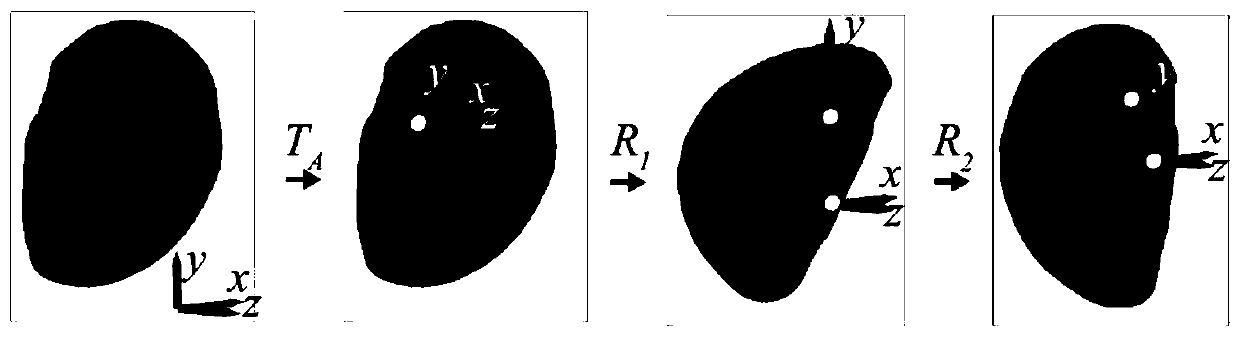
[0105] The data collection and preprocessing module is configured to: collect 3D face data, perform smoothing and denoising preprocessing on the 3D face image, and convert the 3D face into a 3D face with a standard posture;
[0106] The data processing module is configured to: sample the three-dimensional face of the standard pose after projection to obtain the current two-dimensional depth map of each face, and perform difference calculation with the pre-stored depth map to obtain two mutually inverse difference maps ;
[0107] The allocator building block is configured to: perform feature selection and optimize classifier training according to the obtained difference map, and obtain feature selection and optimize classifier models based on different sub-surfaces of the difference map;
[0108] The face recognition module is config...
Embodiment 3
[0110] Embodiment 3 of the present disclosure provides a storage medium on which a program is stored. When the program is executed by a processor, the steps of the face recognition method based on the three-dimensional optimized sub-surface described in Embodiment 1 of the present disclosure are implemented.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More