

Instrument autonomous alignment device in starlight simulation test and alignment method
A technology for simulation testing and aligning devices, applied in the field of astronomical navigation, can solve the problems of unable to reflect the correctness of star sensor recognition or the validity of attitude, large attitude angle error, deviation, etc., to ensure accuracy and test efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
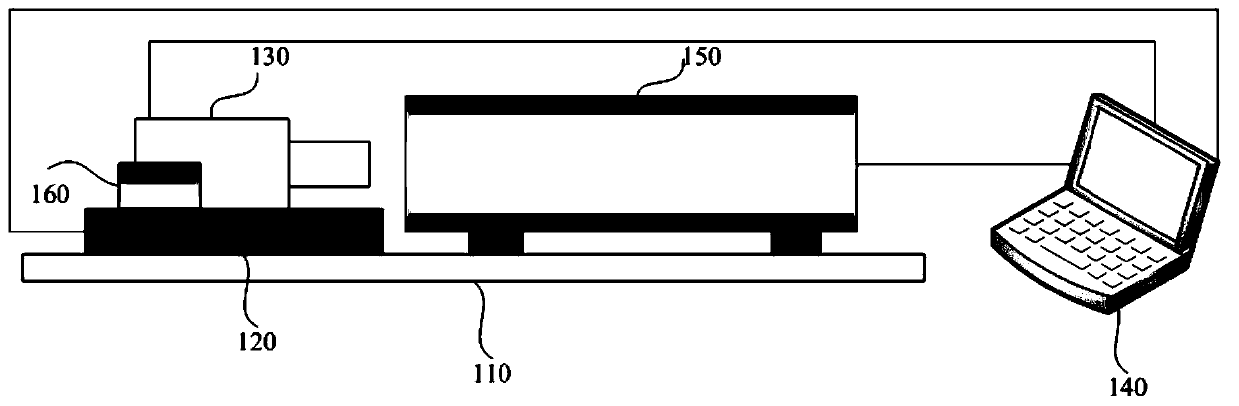
[0030] see figure 1 , is a schematic structural diagram of an instrument autonomous alignment device in a starlight simulation test provided by the present invention, including: an optical shock isolation platform 110, a three-dimensional turntable 120, a star sensor 130, a starlight simulation control computer 140, and a starlight simulator 150. The star sensor 130 is fixed at the central position of the three-dimensional turntable 120, the three-dimensional turntable 120 and the starlight simulator 150 are installed on the optical shock isolation platform 110, and the center of the entrance pupil of the star sensor 130 is At the same height as the center of the exit pupil of the starlight simulator 150 , the three-dimensional turntable 120 , the star sensor 130 and the starlight simulator 150 are connected to the starlight simulation control computer 140 through signals.
[0031] In some preferred embodiments, the shock-isolation platform 110 can be an air-floating shock-iso...
Embodiment 2
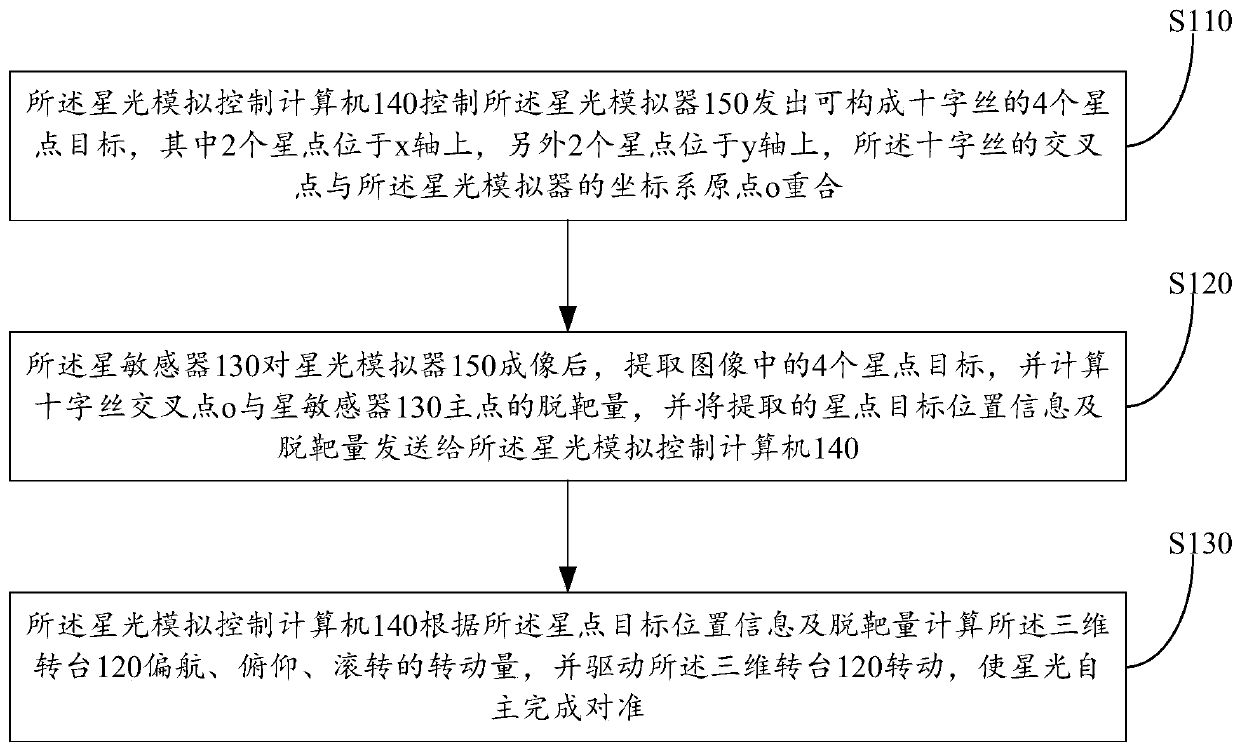
[0037] see figure 2 , the alignment method of the instrument autonomous alignment device in the starlight simulation test provided by the embodiment of the present invention, comprising the following steps:
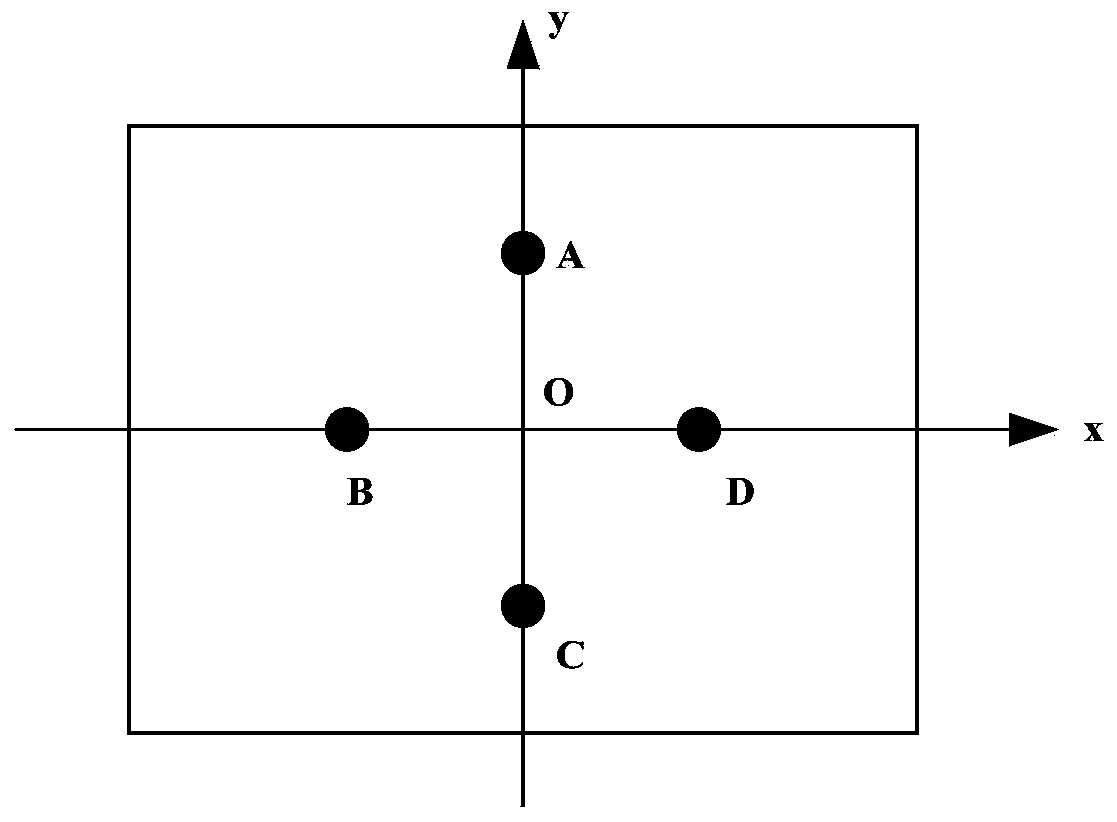
[0038]Step S110: the starlight simulation control computer 140 controls the starlight simulator 150 to send out 4 starpoint targets that can form a crosshair, wherein 2 starpoints are located on the x-axis, and the other 2 starpoints are located on the y-axis. The intersection point of the crosshairs coincides with the origin o of the coordinate system of the starlight simulator.
[0039] Specifically, assuming that the field of view of the star sensor 130 is (θ, δ), the starlight simulator 130 takes the optical axis as the z direction, and the origin of the xoy plane as O(0, 0), respectively simulates two distances on the x-axis distant stars, such as Simulate two star points on the y axis, such as A total of 4 star points A, B, C, D, the star point image sent by...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More