

Visual servo robot measurement time-delay compensation method
A technology of visual servoing and compensation methods, which is applied in the direction of manipulators, program control manipulators, manufacturing tools, etc., can solve the problems of high model accuracy, slow dynamic response, and affecting accuracy, so as to improve robustness and control accuracy. Improvement of servo control performance and improvement of dynamic response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is further clarified in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention but not to limit the scope of the present invention.
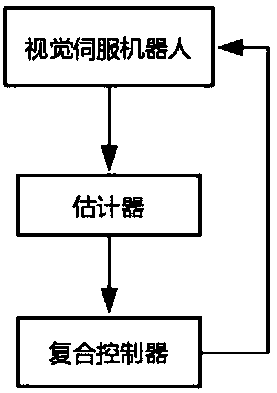
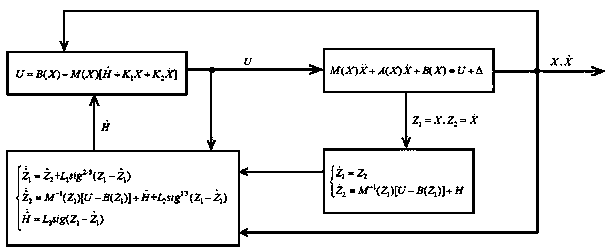
[0026] combine Figure 1 ~ Figure 3 The visual servo robot measurement lag compensation method provided by the present invention comprises the following steps:
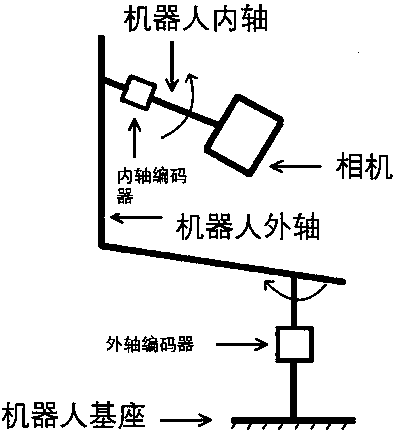
[0027] Step 1: If figure 2 As shown, a camera is installed on the inner axis of the two-axis visual servo robot. The camera shoots the moving target in real time, and extracts the eigenvalues of the moving target from the image captured by the camera. The two-axis visual servo robot controller generates the angular velocity of the two axes of the robot according to the eigenvalues. Encoders are installed on the inner and outer axes of the robot to obtain angular velocity information. The two-axis visual servo robot includes the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More