

Triaxial self-stabilization controllable foreign matter removing device of multi-rotor unmanned aerial vehicle
A multi-rotor drone and foreign object removal technology, which is applied to unmanned aircraft, motor vehicles, aircraft parts, etc., can solve the problems of not being able to freely control the spray angle, high difficulty for operators, and short control spray distance, etc. To achieve the effect of improving cutting safety and cutting accuracy, high environmental requirements, and high safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
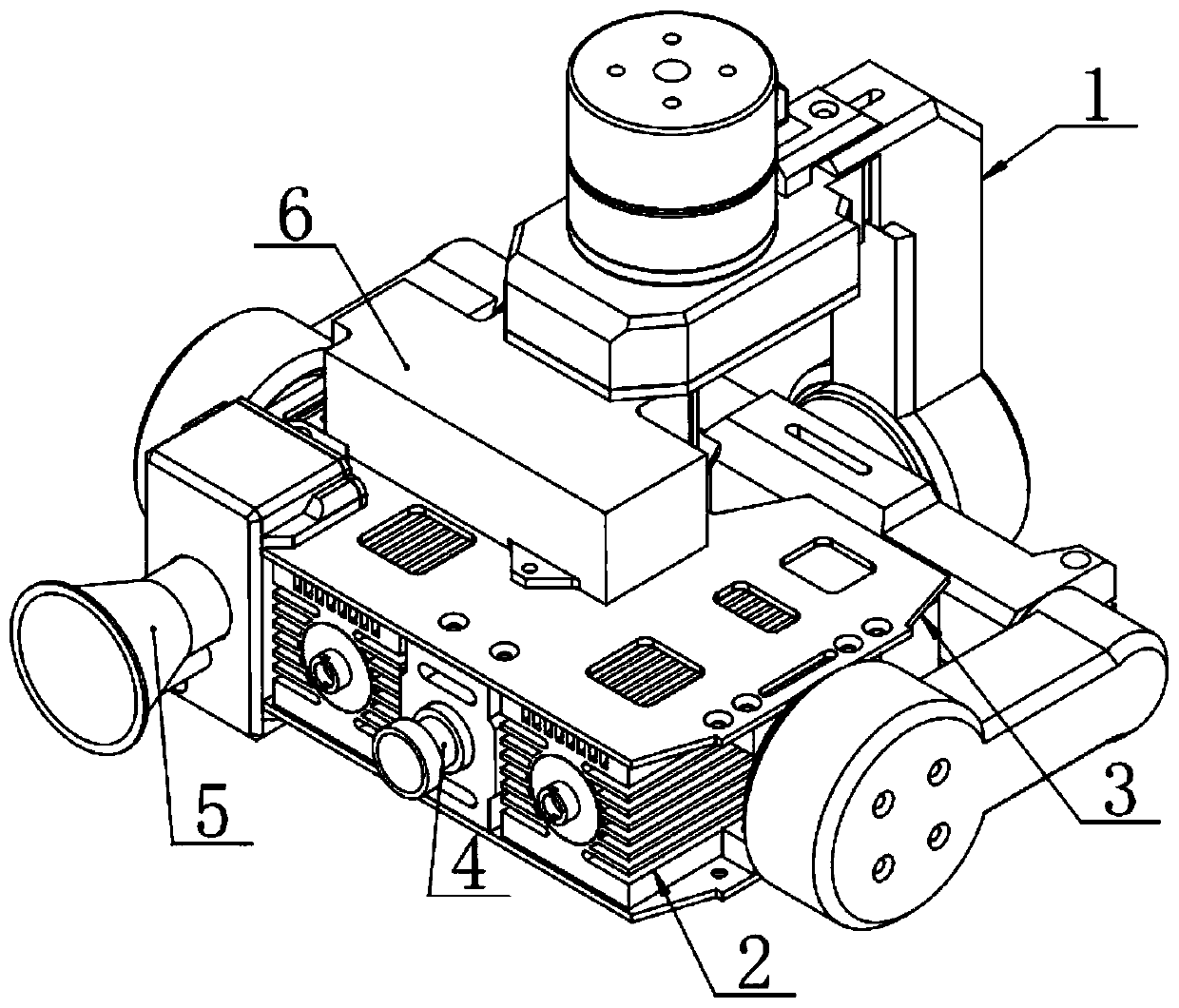
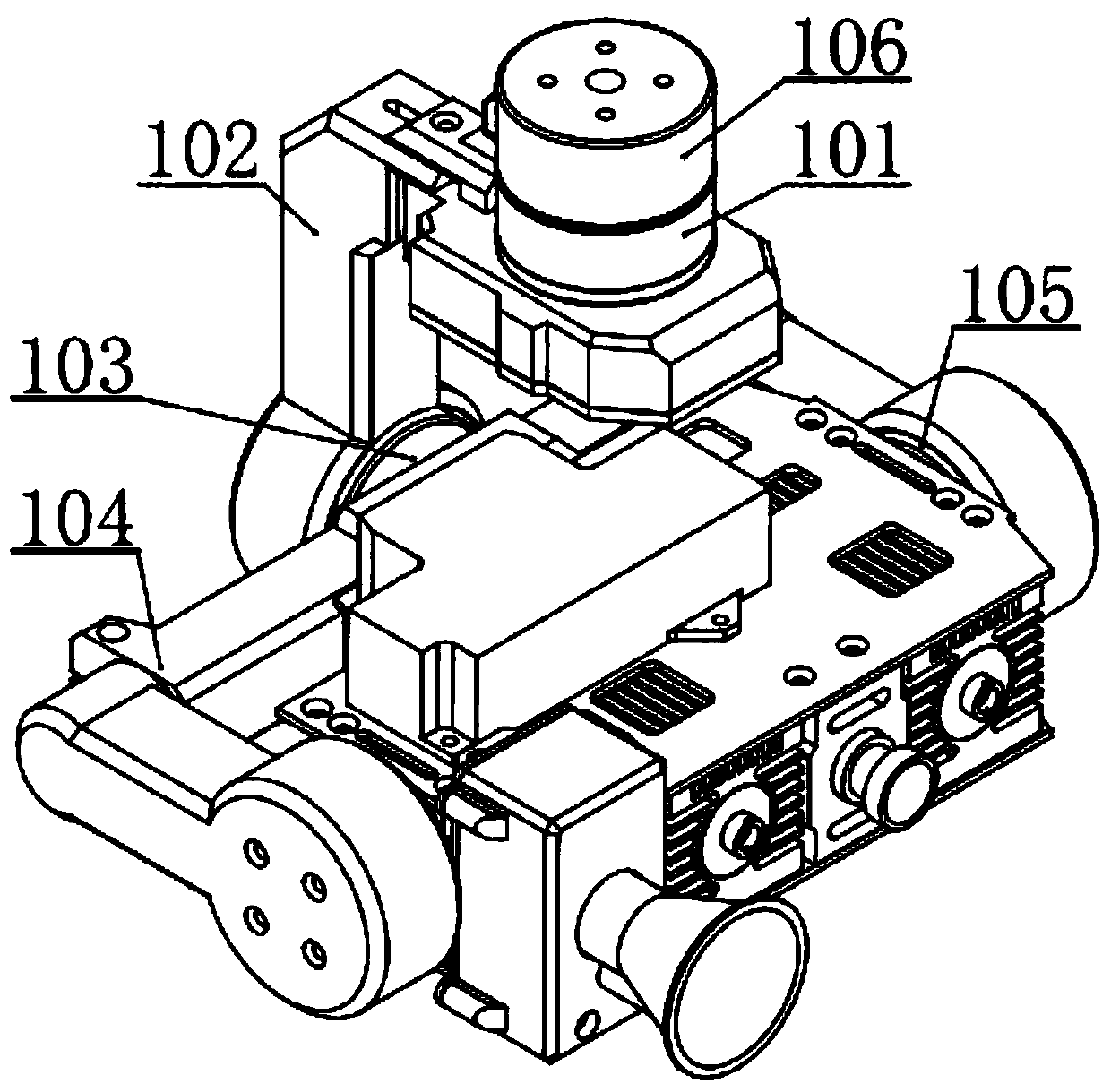
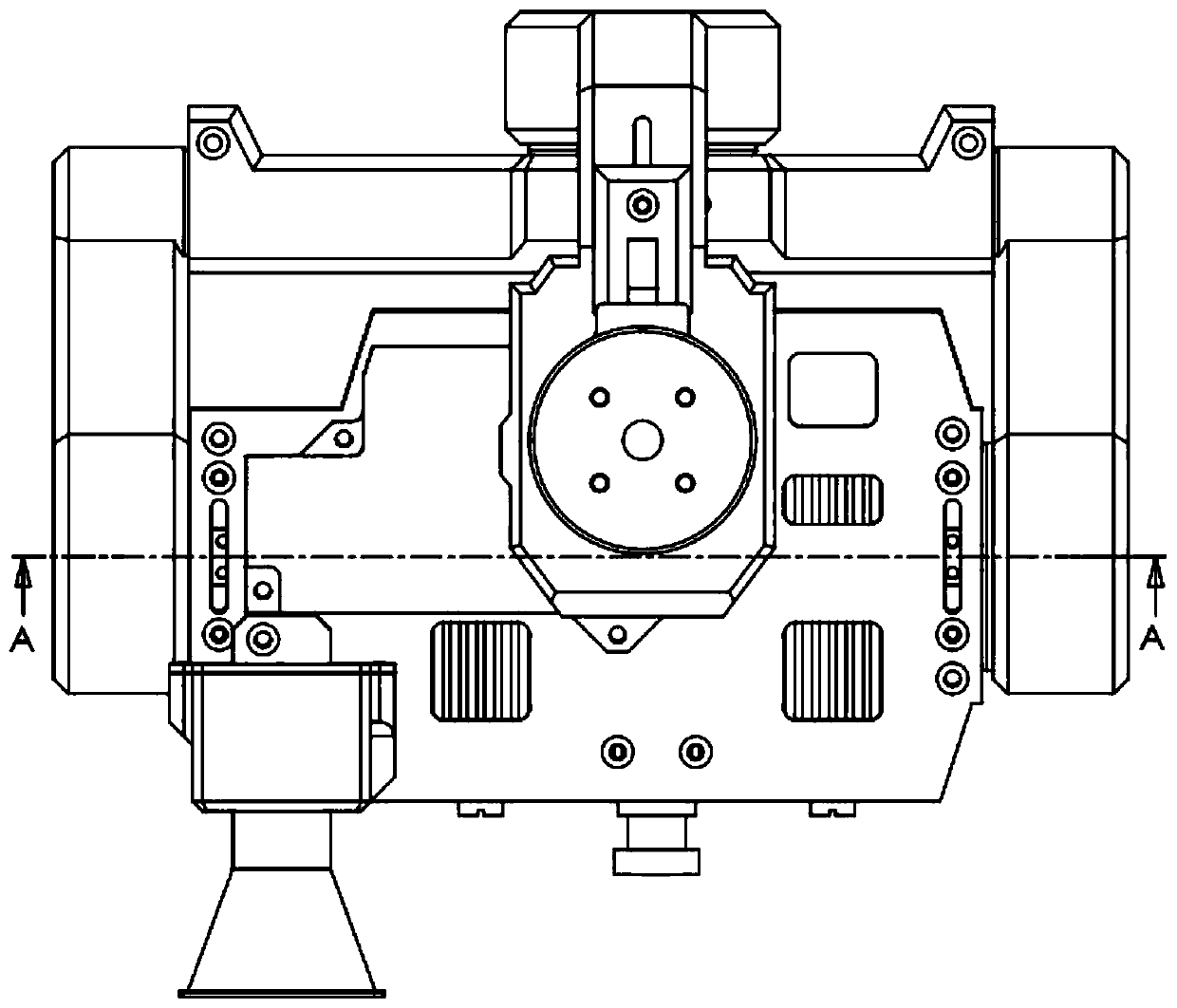
[0026] Embodiment 1: as Figure 1-Figure 6 As shown, a three-axis self-stabilizing and controllable foreign object removal device for a multi-rotor UAV includes a three-axis stabilized pan-tilt 1 and a laser module 2, and the top of the three-axis stabilized pan-tilt 1 is fixedly connected to the multi-rotor UAV. The laser module 2 is fixedly connected to the frame 3, and the frame 3 is fixedly connected to the pitch output end of the three-axis stabilized gimbal 1.
[0027] Preferably, the above-mentioned three-axis self-stabilizing and controllable foreign object removal device for a multi-rotor UAV further includes an ultrasonic ranging module 5 and a camera 4 , and the ultrasonic ranging module 5 and the camera 4 are fixedly connected to the frame 3 .
[0028] Preferably, the above-mentioned laser module 2 adopts two sets, the lasers of the two sets of laser modules 2 converge at one point, the camera 4 is located between the two sets of laser modules 2, and the ultrasonic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More