Motion control method suitable for extreme application conditions
A motion control and conditional technology, applied in general control systems, program control, comprehensive factory control, etc., can solve problems such as difficulty in adapting to extreme environmental conditions, poor control accuracy, etc., and achieve the effect of various motion control methods and high control sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
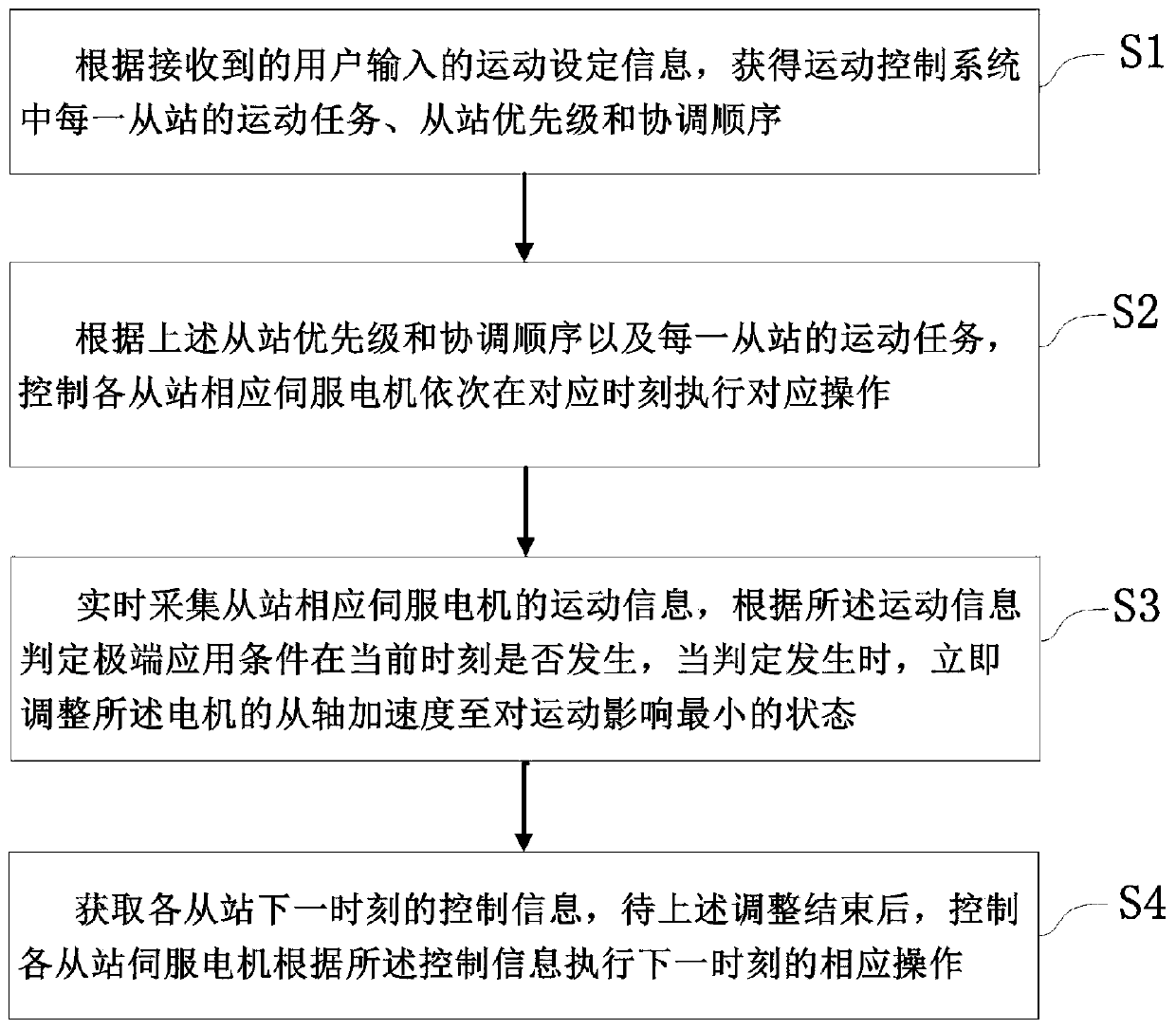
[0068] A specific embodiment of the present invention discloses a motion control method suitable for extreme application conditions, such as figure 1 shown, including the following steps:
[0069] S1. Obtain the motion task, slave station priority and coordination sequence of each slave station in the motion control system according to the received motion setting information input by the user;
[0070] S2. According to the priority and coordination order of the above slave stations and the motion tasks of each slave station, control the corresponding servo motors of each slave station to perform corresponding operations at corresponding times in turn;
[0071] S3. Collect the motion information of the corresponding servo motor of the slave station in real time, judge whether the extreme application condition occurs at the current moment according to the motion information, and immediately adjust the slave shaft acceleration of the motor to a state that has the least impact on ...
Embodiment 2
[0079] The optimization is carried out on the basis of Embodiment 1. In step S1, the motion task of each slave station includes: the start time of each slave axis of the servo motor, motion rules, motion time, motion priority and coordination sequence.
[0080] Specifically, the above-mentioned movement priority refers to, in some extreme cases, the slave axis does not move to the set preset position at the current moment, whether the slave station controls the slave axis to continue to move to the preset position or directly execute the next operation Sort. This situation often occurs in extreme application conditions, and the motion priority needs to be set according to actual needs.
[0081] Preferably, the above-mentioned coordination order refers to coordination according to priority, that is, in some extreme cases, the slave axis does not move to the set preset position at the current moment, whether the slave station controls the slave axis to continue to move to the pr...
Embodiment 3
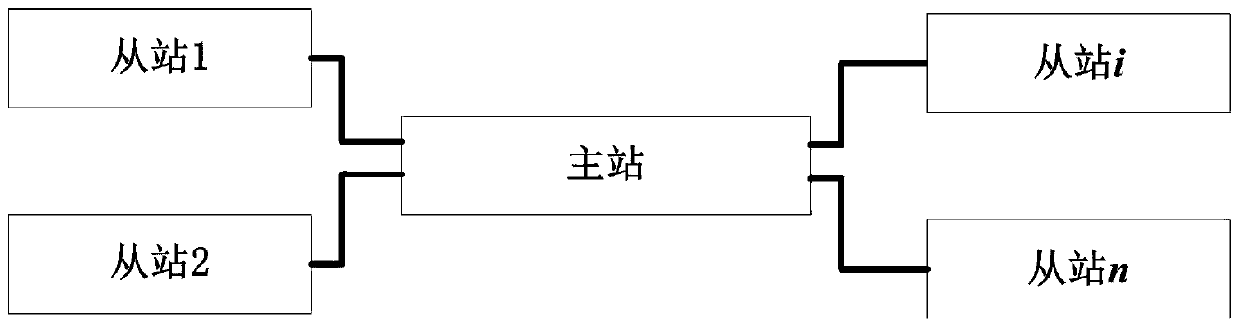
[0120] A specific embodiment of the present invention discloses a motion control system applicable to extreme application conditions corresponding to Embodiment 1, such as figure 2 As shown, including the master station and more than 1 slave station.
[0121] The master station is used to receive the motion setting information input by the user, analyze it to obtain the motion task, slave station priority and coordination order of each slave station, and obtain feedback from the corresponding slave stations in turn according to the optimization level and coordination order information, according to the motion task and feedback information to obtain the control information of the slave station at the next moment, and send it to the corresponding slave station.
[0122] The slave station is used to monitor the motion information of the corresponding servo motor in real time, judge whether the extreme application condition occurs in real time according to the motion information,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com