Motion control system suitable for extreme application conditions
A motion control system and motion control technology, applied in general control systems, control/regulation systems, digital control, etc., can solve problems such as poor control accuracy, difficulty in adapting to extreme environmental conditions, etc. The effect of clear boundaries
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
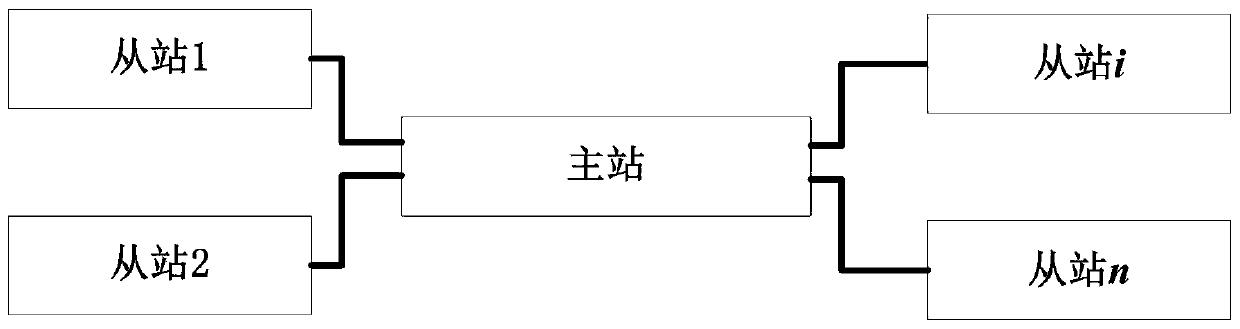
[0067] A specific embodiment of the present invention discloses a motion control system suitable for extreme application conditions, such as figure 1 As shown, including the master station and more than 1 slave station.
[0068] The master station is used to receive the motion control setting information input by the user, obtain the control adjustment information of the corresponding servo driver of the slave station at the current moment according to the setting information and the real-time motion data fed back by the slave station, and combine the control adjustment information and the setting information After the fixed information is converted into a control signal, it is sent to the corresponding slave station in the form of a broadcast data frame.
[0069] The slave station is used to receive the broadcast data frame of the master station, analyze it, extract the corresponding control adjustment information and the slave station setting parameters in the setting inform...
Embodiment 2
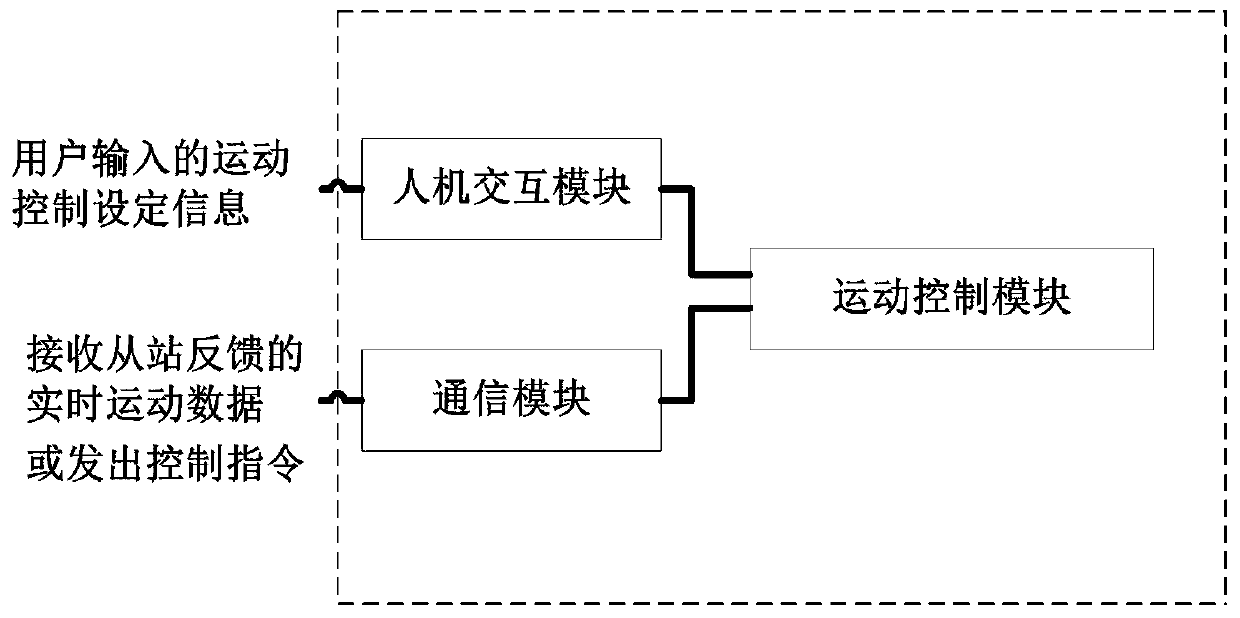
[0075] Optimizing on the basis of Embodiment 1, the master station further includes a human-computer interaction module, a motion control module, and a communication module. Among them, the output terminals of the human-computer interaction module and the communication module are connected with the input terminals of the motion control module in sequence, such as figure 2 shown.
[0076] The human-computer interaction module is used to accept the motion control setting information input by the user before the servo motor starts to move, convert it into the setting parameters of each slave station and send it to the motion control module, and, during the servo motor movement , to display the motion data of each slave station to the user in real time.
[0077] The motion control module is used to obtain the control adjustment information of the corresponding servo driver of the slave station at the current moment according to the setting parameters of the above-mentioned slave...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com