

Seven-degree-of-freedom redundancy mechanical arm task constraint path planning method under Descartes space
A Cartesian space and path planning technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to guarantee the optimal trajectory of the end
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
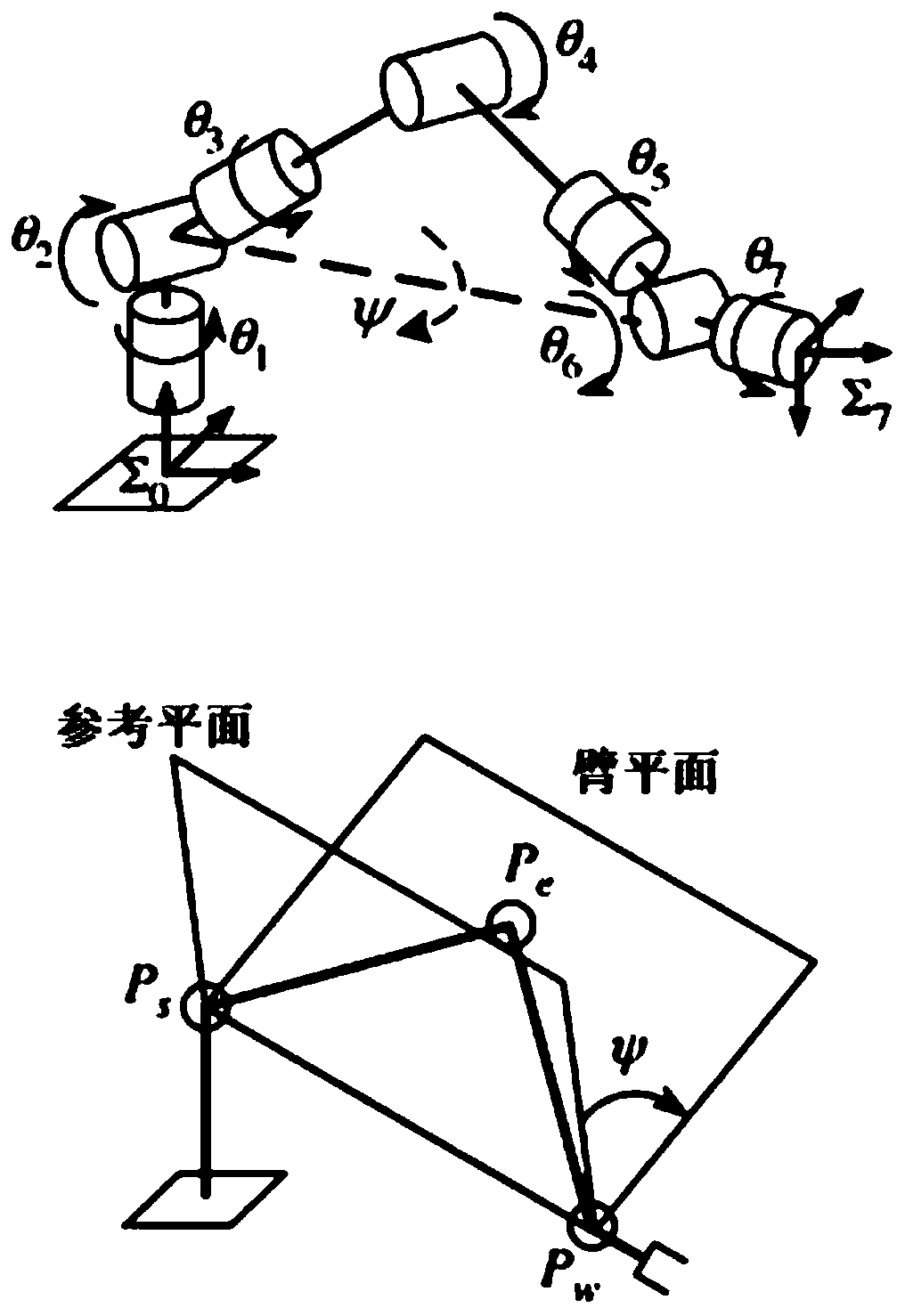
[0028] Specific implementation mode 1. Combination Figure 1 to Figure 7 Illustrate this embodiment, the seven-degree-of-freedom redundant manipulator task-constrained path planning method under Cartesian space, is characterized in that: it comprises the following steps:
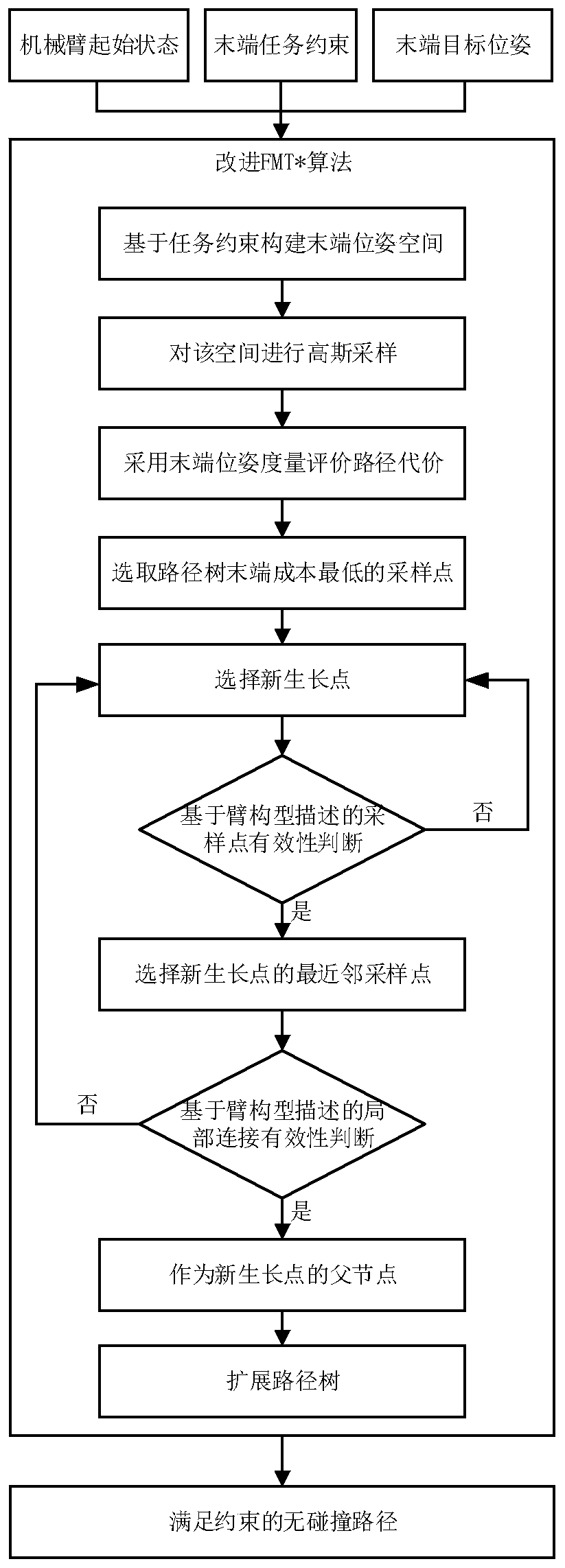
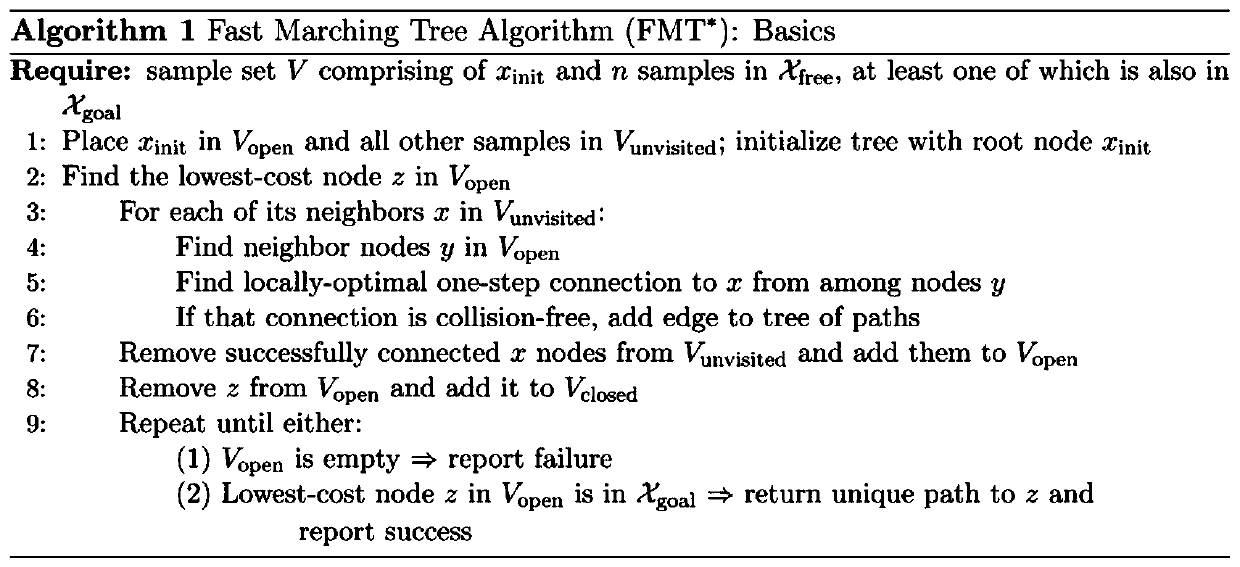
[0029] Step 1. Improve the construction steps of the FMT* algorithm model, including:
[0030] Step 1. Improve the construction steps of the FMT* algorithm model, including:
[0031] Step 11, define the constrained pose space at the end of the manipulator based on the task constraint function in the Cartesian space;
[0032] Step 12: Gaussian sampling is performed according to the constrained pose space defined in step 11, and a path tree node set is constructed based on the starting point of the end of the manipulator;
[0033] Step 13: According to the sampling points collected in step 12, use the end-constrained pose space distance metric to evaluate the path cost, and return the distance cost between t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More