

Neural Network-Based Cooperative Path Tracking Control Method for Constrained Mobile Robots
A mobile robot and neural network technology, applied in the field of restricted mobile robot cooperative path tracking control, can solve the problem of inability to handle nonlinear modeling uncertainty, increasing the difficulty of mobile robot controller, unknown parameters or nonlinear modeling uncertainty And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
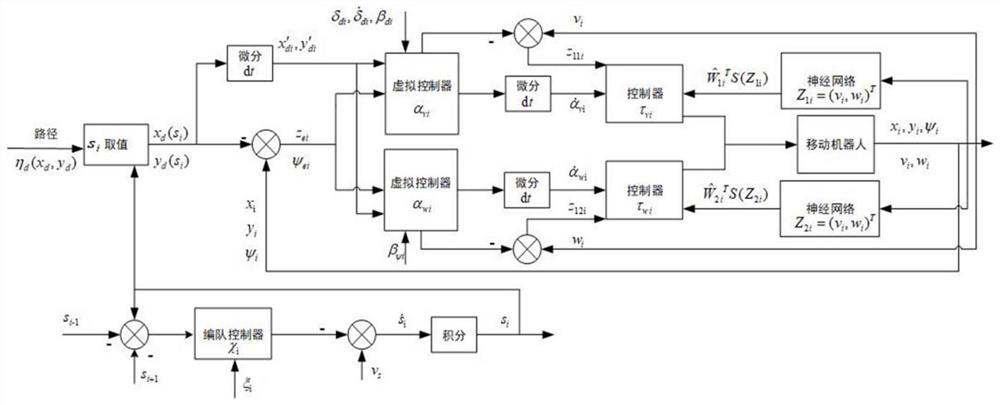
[0112] like figure 1 As shown, the present embodiment provides a neural network-based cooperative path tracking control method for limited mobile robots, including the following steps:
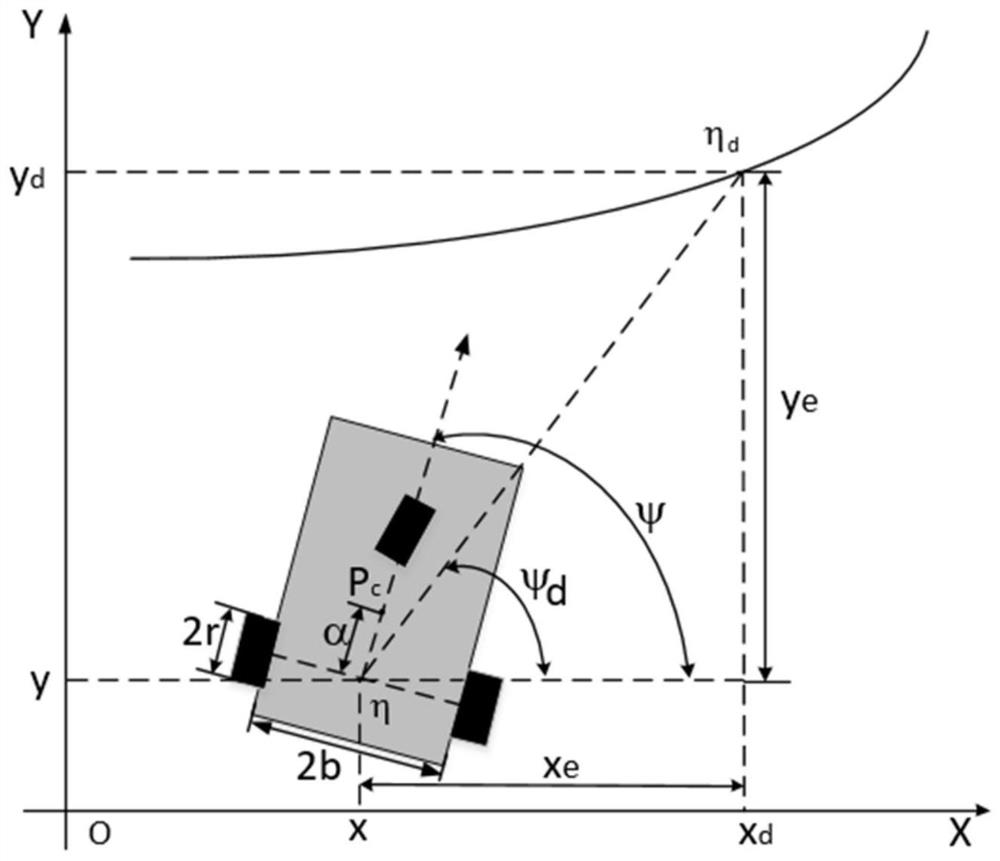
[0113] Step 1, such as figure 2 As shown, the kinematics and dynamics model of a single mobile robot is established, and then the model equation is converted, the basic kinematics and dynamics model is converted into a differential equation of pose and state, and extended to the i-th mobile robot, In this embodiment, three mobile robots are used for illustration in the formation;
[0114] The kinematics and dynamics model of a single mobile robot is established as:
[0115]
[0116]
[0117] where, η = [x, y, ψ] T , x, y, ψ are the position (x, y) and direction angle (ψ) of the mobile robot respectively, w=[w 1 ,w 2 ] T ,w 1 ,w 2 are the angular velocities of the left and right wheels of the mobile robot, τ=[τ 1 , τ 2 ], τ 1 , τ 2 are the control torques of the left and righ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More