

Clamping mechanism for robot-assisted lower limb fracture reduction operation
A robot-assisted and clamping mechanism technology, applied in the field of robots, can solve the problems of inconvenient operation, unstable fixation of broken bones, affecting the safety and accuracy of fracture reduction surgery, and achieves the effect of convenient operation and good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below with reference to the embodiments and the accompanying drawings.
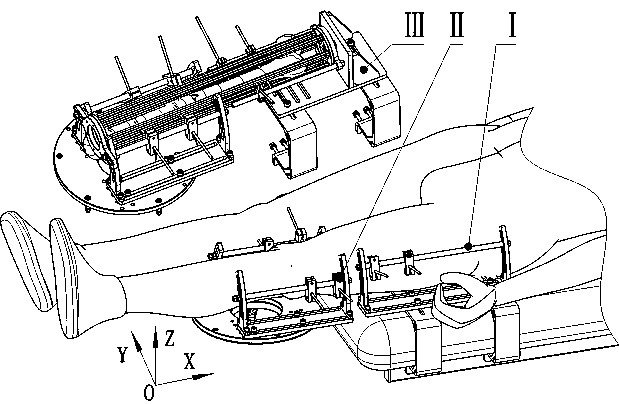
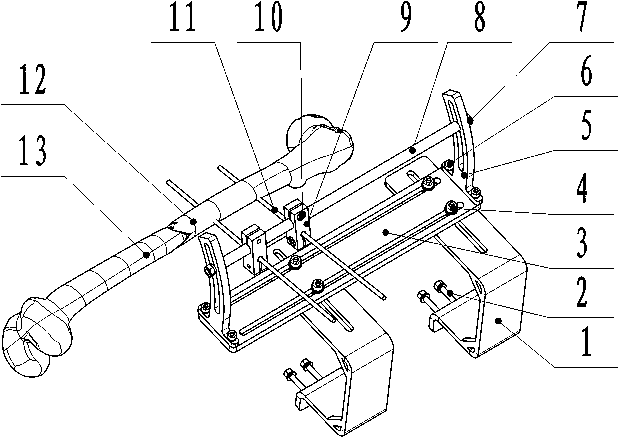
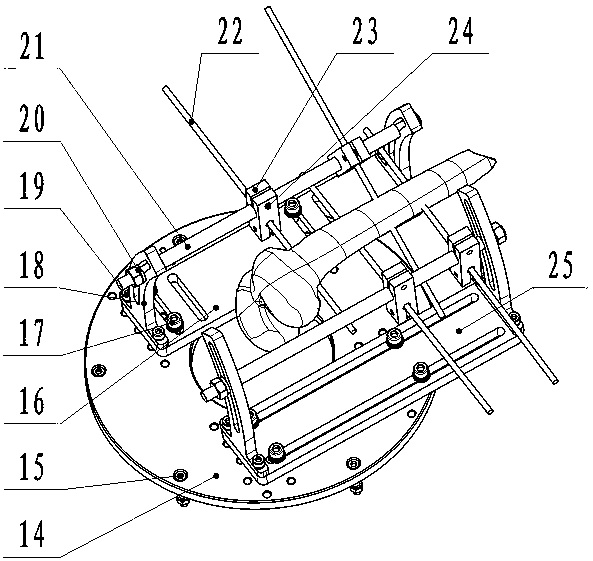
[0021] like figure 1 As shown, a clamping mechanism for robot-assisted lower extremity fracture reduction surgery is composed of a proximal fracture fixing mechanism module I, a distal fracture clamping mechanism module II, and a reduction force testing module III. The proximal fracture fixing module is composed of The bracket 1 of I is fixed on the frame of the operating bed through the first bolt 2, the proximal fracture fixing module I fixes the proximal fracture 12 through the first bone pin 11, and the connecting plate 14 of the distal fracture clamping module II is connected to the parallel reduction robot. The moving platform is connected by the third bolt 15, the fracture distal end clamping module II clamps the fracture distal end 13 through the second bone pin 22, and the distal muscle bundle fixing plate 26 of the reduction force test modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More