

Manipulator with two-stage compliant power transmission and its grasping method
Patent Information
- Authority / Receiving Office
- CN · China
- Patent Type
- Patents(China)
- Current Assignee / Owner
- ANHUI POLYTECHNIC UNIV
- Publication Date
- 2020-12-22
Smart Images
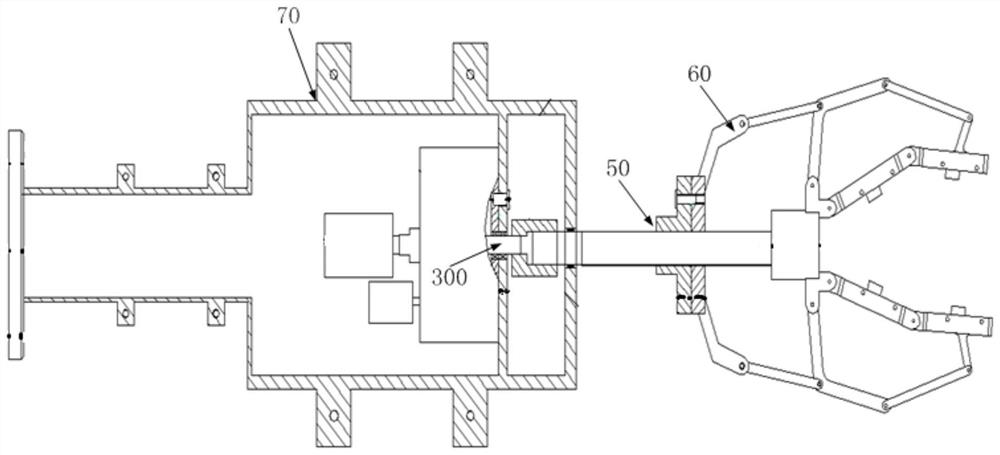
Figure 1 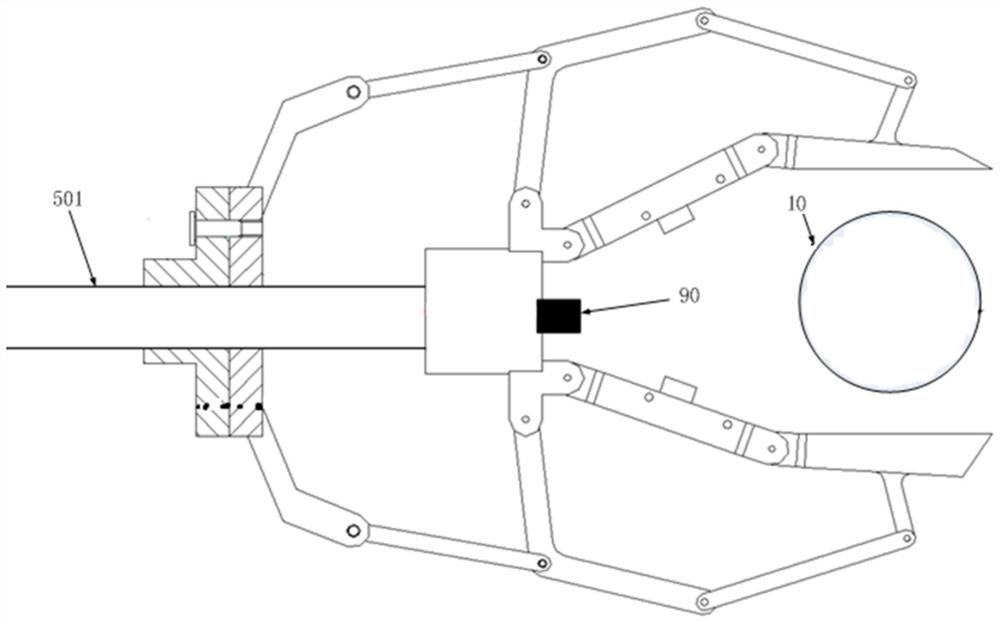
Figure 2 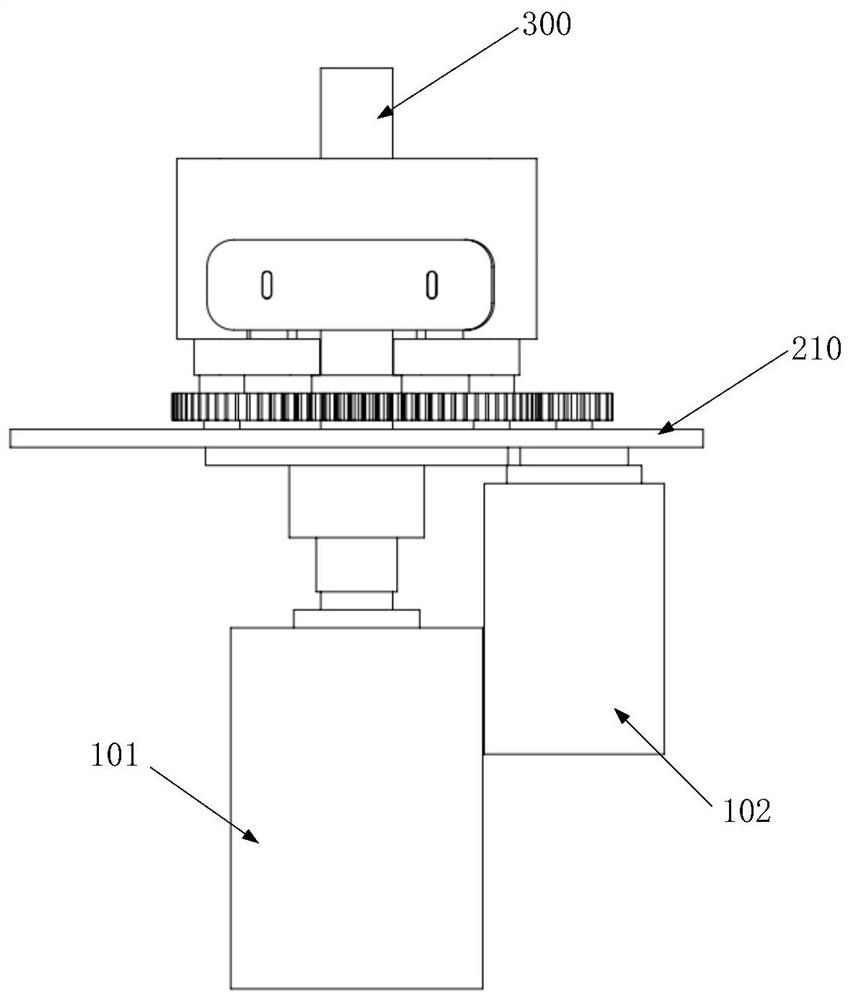
Figure 3
Abstract
Description
technical field
[0001] The invention relates to a manipulator, in particular to a manipulator with two-stage compliant power transmission and a grasping method thereof. Background technique
[0002] The manipulator can imitate certain motion functions of the human hand and arm, and is used to grab, carry objects or operate automatic operating devices according to a fixed program. The manipulator is the earliest industrial robot and the first modern robot. It can replace the heavy labor of human beings to realize the mechanization and automation of production, and can operate in harmful environments to protect personal safety. Broad application space.
[0003] The existing technology changes the external load of mechanical equipment, mainly through the adjustment of the motor drive parameters to change the output torque of the transmission system to achieve the balance of the system. This method requires an adjustment process, and the change of the drive parameters will easi...