

Dual-mechanical arm synergic movement method and system
A dual-arm, coordinated motion technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as economic losses, high requirements for operators, and safety hazards for operators, so as to improve work efficiency and have a wide range of applications , good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
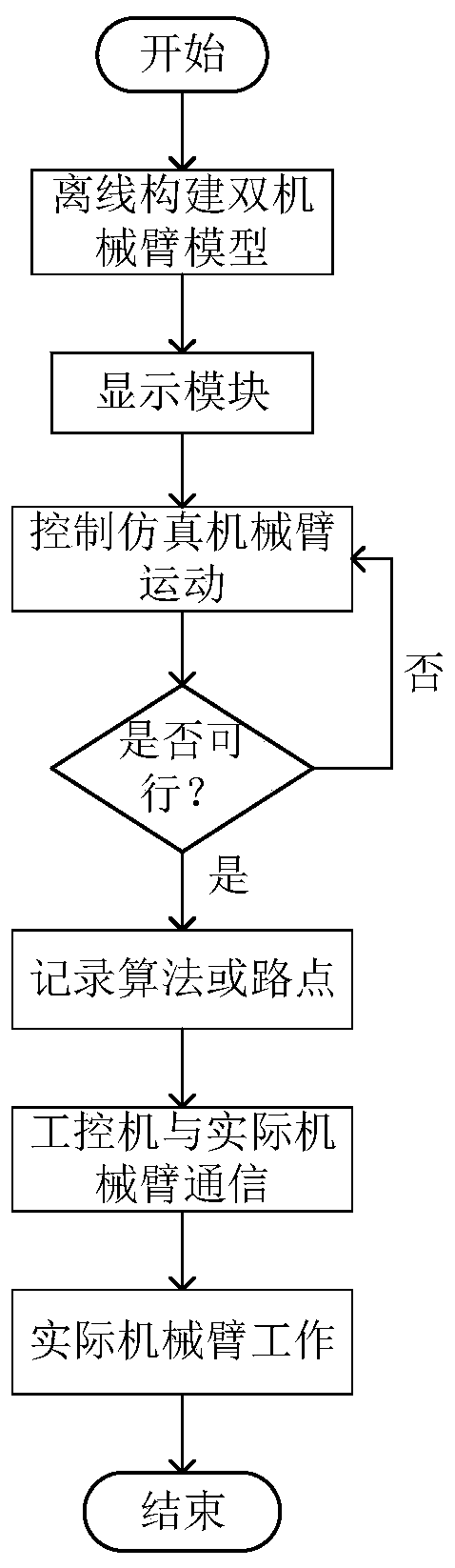
[0021] combine figure 1 , the present invention double mechanical arm coordinated movement method, comprises the following steps:
[0022] Step 1. The industrial computer performs modeling based on the physical dual robotic arms, and constructs a virtual dual robotic arm 3D space model including surrounding environment information. The relevant data of the model is stored in the industrial computer model library, and the virtual dual robotic arm 3D space model is sent to To the display module display;
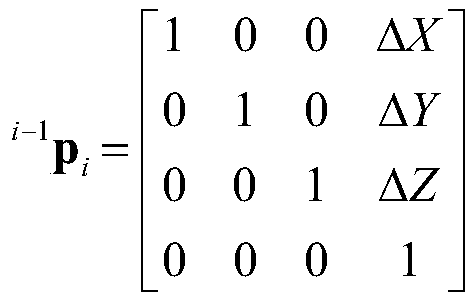
[0023] Step 2. The industrial computer performs kinematic modeling on the robotic arm;
[0024] Step 3, the industrial computer determines the cooperation range of the dual robotic arms;
[0025] Step 4. The industrial computer controls the movement of the virtual dual robotic arms to the target pose according to the actual needs, and displays the joint angles and motion status of the virtual dual robotic arms in real time on the display module, and performs path planning and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More