

An Improved Dynamic RRT* Motion Planning Method for Mobile Robots
A robot movement and mobile robot technology, applied in the direction of instruments, non-electric variable control, two-dimensional position/channel control, etc., to achieve the effects of fast convergence speed, good path quality, and fast execution speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] In order to make the above-mentioned features and advantages of the present invention more comprehensible, the following specific embodiments are described in detail with reference to the accompanying drawings, but the present invention is not limited thereto.
[0057] refer to Figure 1 to Figure 11 .
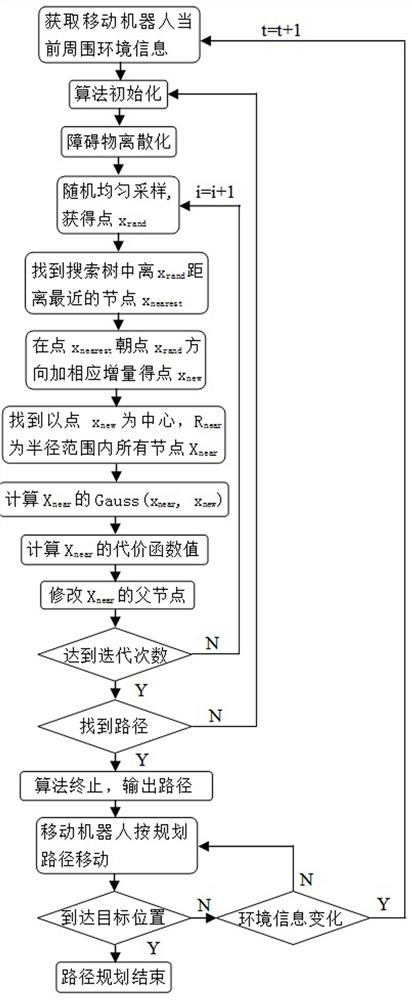
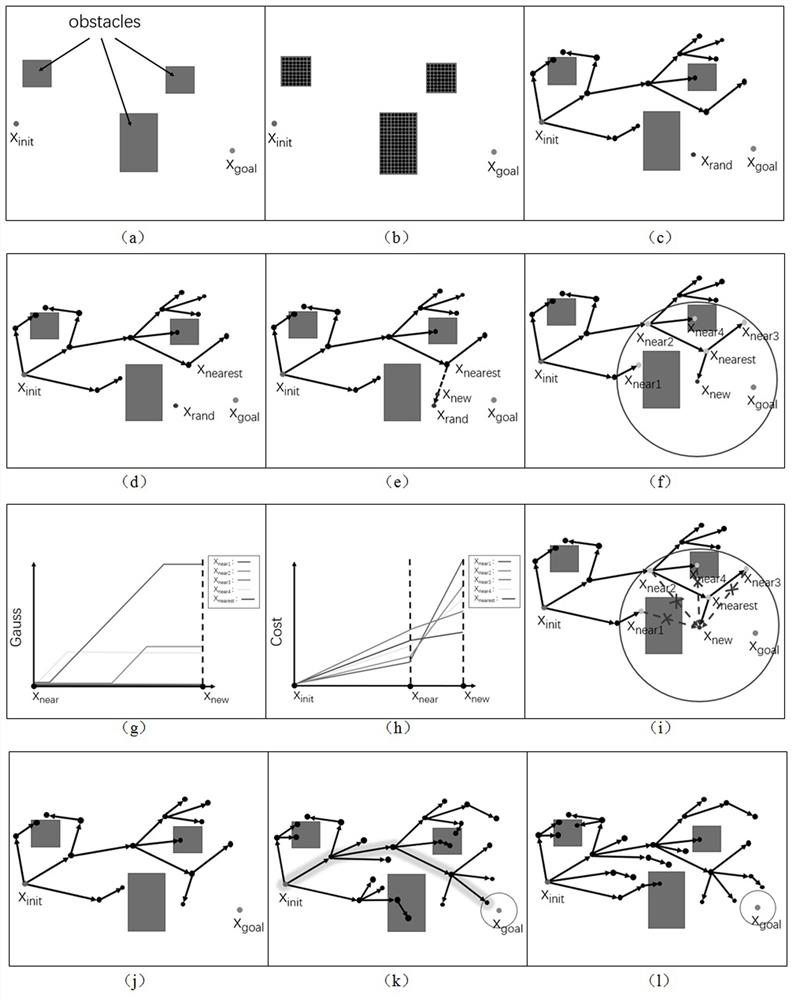
[0058] The present invention proposes a mobile robot motion planning method of an improved dynamic RRT*, comprising the following steps:
[0059] Step S1. Obtain the current surrounding environment information of the mobile robot: Obtain the environmental information within the radius of the mobile robot through the laser radar or depth camera. The unscanned position is in an unknown state, and the scanned position without obstacles is in a free state. The location with obstacles presents an occupied state; during the process of moving the robot according to the planned path, it continuously obtains the environmental information around the new location, and combines it...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More