

Control method of lower limb walking-aid exoskeleton robot and exoskeleton robot
A technology of exoskeleton robot and control method, which is applied in the direction of devices that help people walk, sensors, medical science, etc. It can solve problems such as easy to fall, untreated intermediate phases, etc., and achieve the effect of improving flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
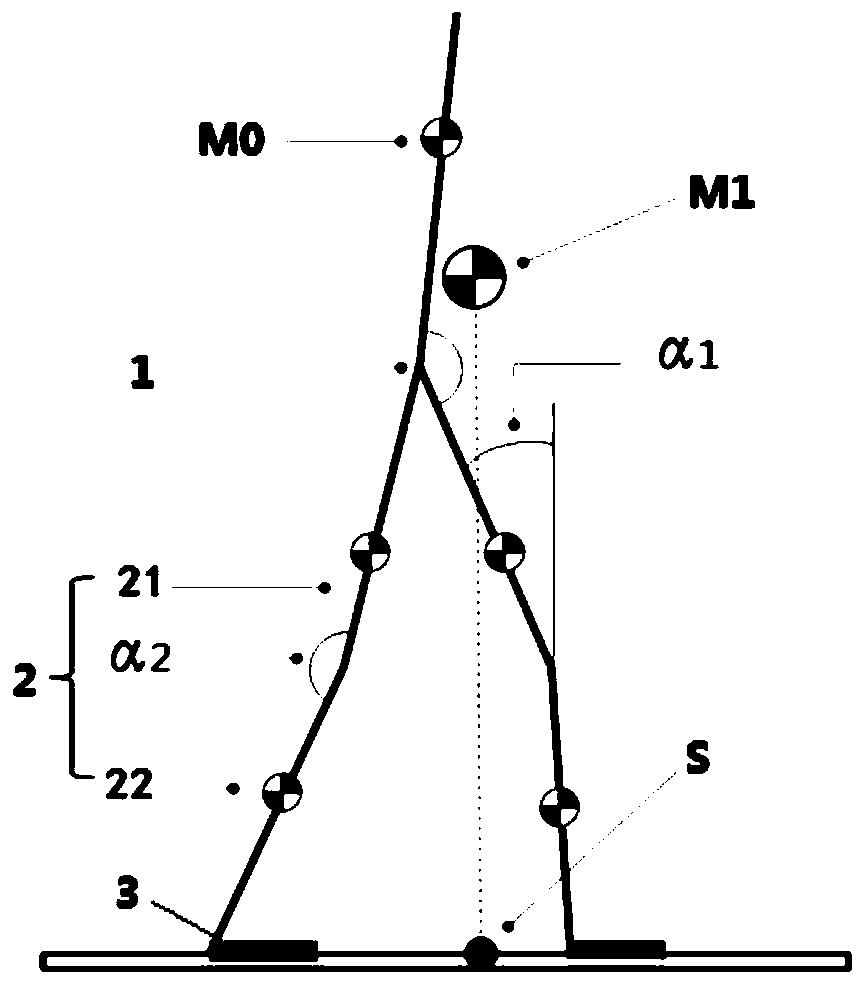
[0040] The lower-limb assisted exoskeleton robot is a new type of wearable smart device. This invention abstracts the two legs of the robot into a two-link mechanism, and simplifies the user's upper limb trunk into a mass point M0 located in the middle of the waist, such as figure 1 As shown, the exoskeleton robot includes a waist 1, a leg 2 connected to the waist 1, and a shoe 3 connected to the leg 2, and the leg 2 is abstractly composed of a thigh 21 and a calf 22 two-bar linkage mechanism.
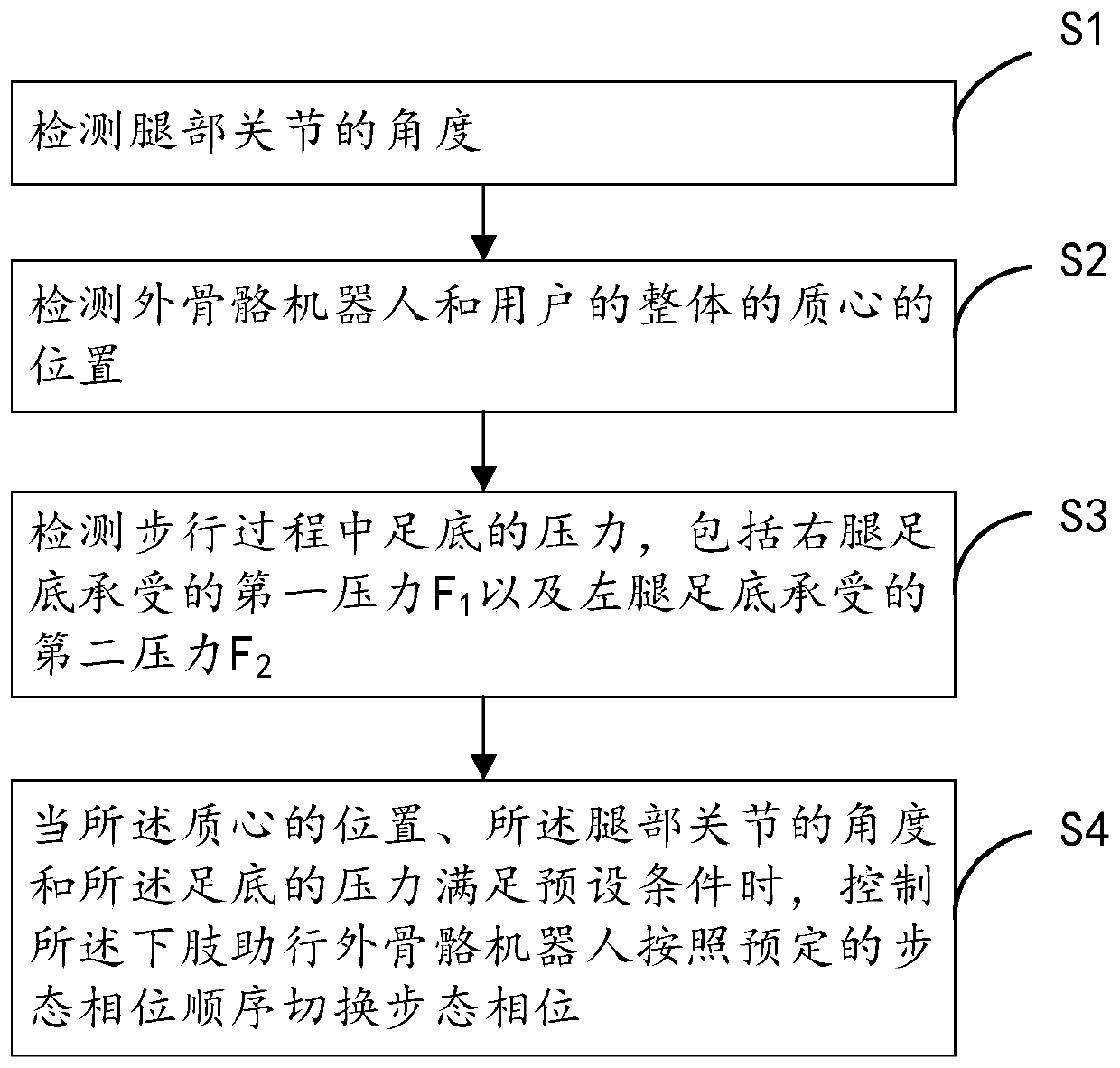
[0041] Based on the model, the present invention provides an embodiment of a control method for a lower limb walking exoskeleton ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More