

Time-varying feedback finite-time stabilization method of control limited spacecraft rendezvous control system
A control system, time-varying feedback technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve the problem of inability to achieve limited-time spacecraft rendezvous tasks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0019] Specific implementation mode one: a time-varying feedback finite-time stabilization method for a control-limited spacecraft rendezvous control system, which includes:
[0020] Step 1. Establishing the orbital dynamics model of the control system for the rendezvous control of the limited spacecraft, and obtaining the state space equation;
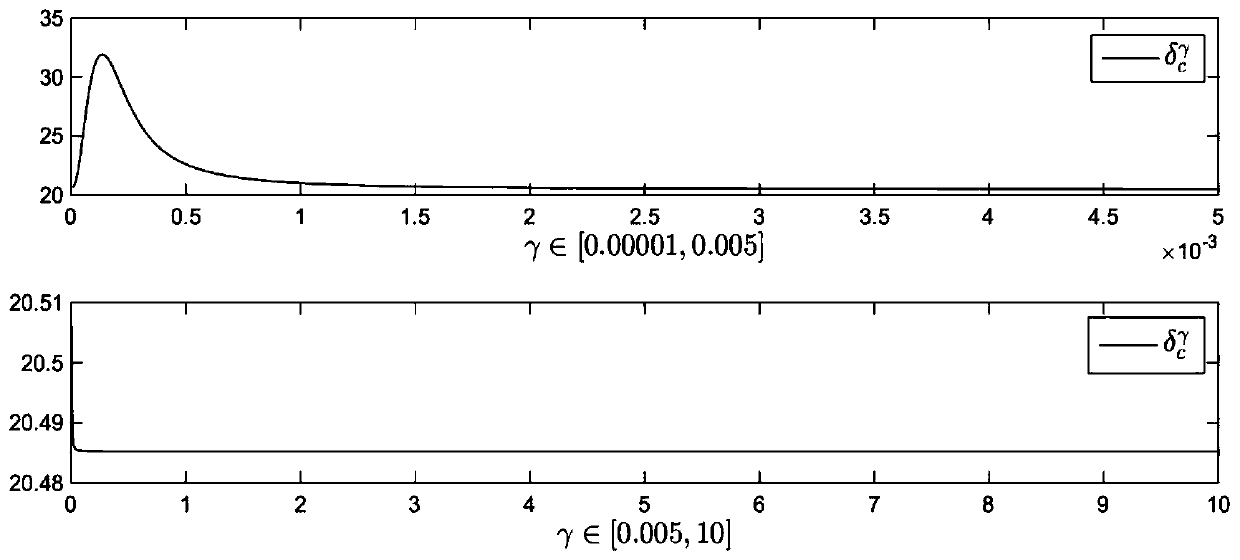
[0021] Step 2. Establish the parameter Lyapunov equation and analyze its properties. Through the positive definite solution P(γ) of the parameter Lyapunov equation, design an explicit linear time-varying feedback control law under the control-limited situation, that is, design the control-limited spacecraft rendezvous control The state feedback controller of the system;
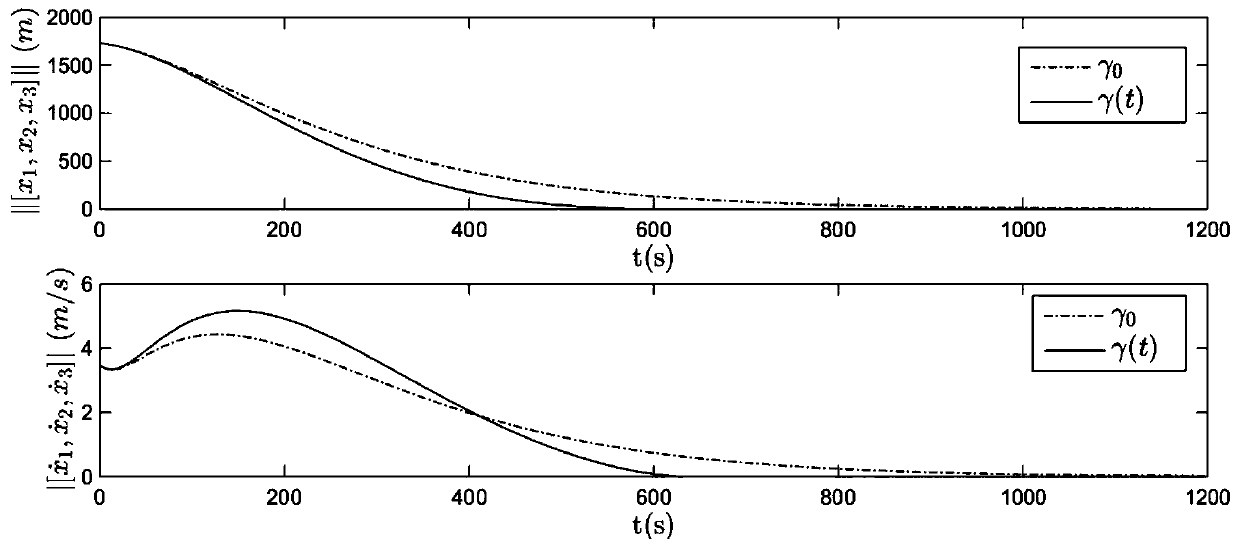
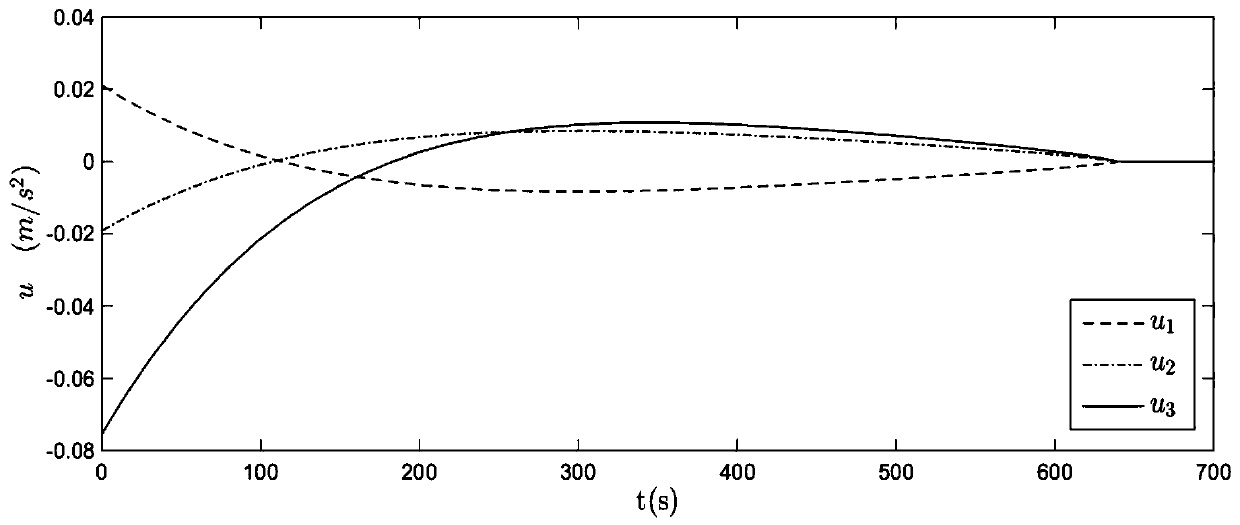
[0022] Step 3. By constructing an explicit Lyapunov function and using the properties of the solution of the parametric Lyapunov equation to design the controller parameters, it is guaranteed that the tracking spacecraft and the target spacecraft are within a finite ...
specific Embodiment approach 2
[0023] Specific implementation mode two: the difference between this implementation mode and specific implementation mode one is that step one is specifically:
[0024] Establish the mathematical model of the spacecraft rendezvous control system: the nonlinear relative motion equations of the target spacecraft and the catching spacecraft are:
[0025]
[0026] in
[0027] Introduce the orbital coordinate system o-xyz of the target spacecraft, whose origin o is located at the center of mass of the target spacecraft, the x-axis is along the direction of the tangent of the orbit of the target spacecraft, the z-axis is along the direction of the radius of the circular orbit, and the y-axis points out of the orbital plane Form a right-handed coordinate system with the x-axis and z-axis, where, is the normalized acceleration vector on the thruster of the chasing spacecraft, a 1 , a 2 , a 3 is the acceleration generated by the thruster in the directions of x-axis, z-axis an...
specific Embodiment approach 3
[0033] Embodiment 3: The difference between this embodiment and Embodiment 2 is that in the formula (1), μ=GM, μ is a gravitational parameter, M is the mass of a star, and G is a gravitational constant.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More