

Visual positioning bionic snake mouth picking mechanism, unmanned aerial vehicle harvesting device and unmanned aerial vehicle harvesting method
A technology for visual positioning and bionic snakes, which is applied to picking machines, agricultural machinery and implements, unmanned aerial vehicles, etc., can solve the problems of low picking efficiency, high labor intensity, and unsuccessful picking, etc., and achieve good bionic effects without difficulty. Collision, fast response characteristics, stable and firm effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
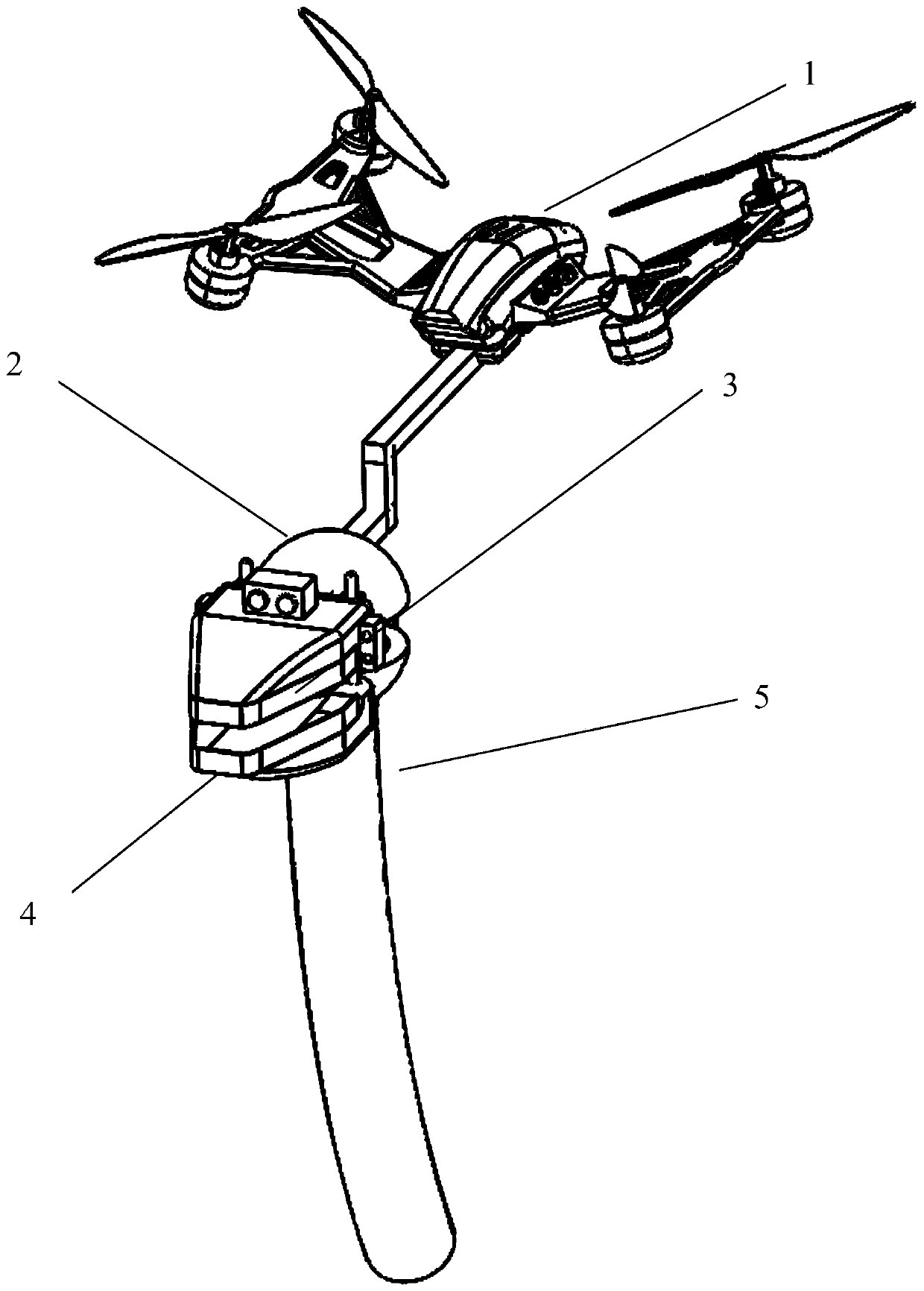
[0041] Such as figure 1 , figure 2 , image 3 As shown, a visual positioning drone harvesting device includes a drone main body 1 and a visual positioning bionic snake mouth picking mechanism 2; the bionic snake mouth picking mechanism 2 is installed on the drone main body 1 through a bracket 6, The inside of the support 6 is provided with a circuit, and the circuit is used to supply power to electromagnets, rotating motors, binocular cameras, distance sensors and other equipment that require electricity. The installation method of the bracket 6 is pluggable, that is, a line is arranged inside the bracket, and the end of the bracket is similar to a power plug, and the power is obtained by plugging it into the drone.
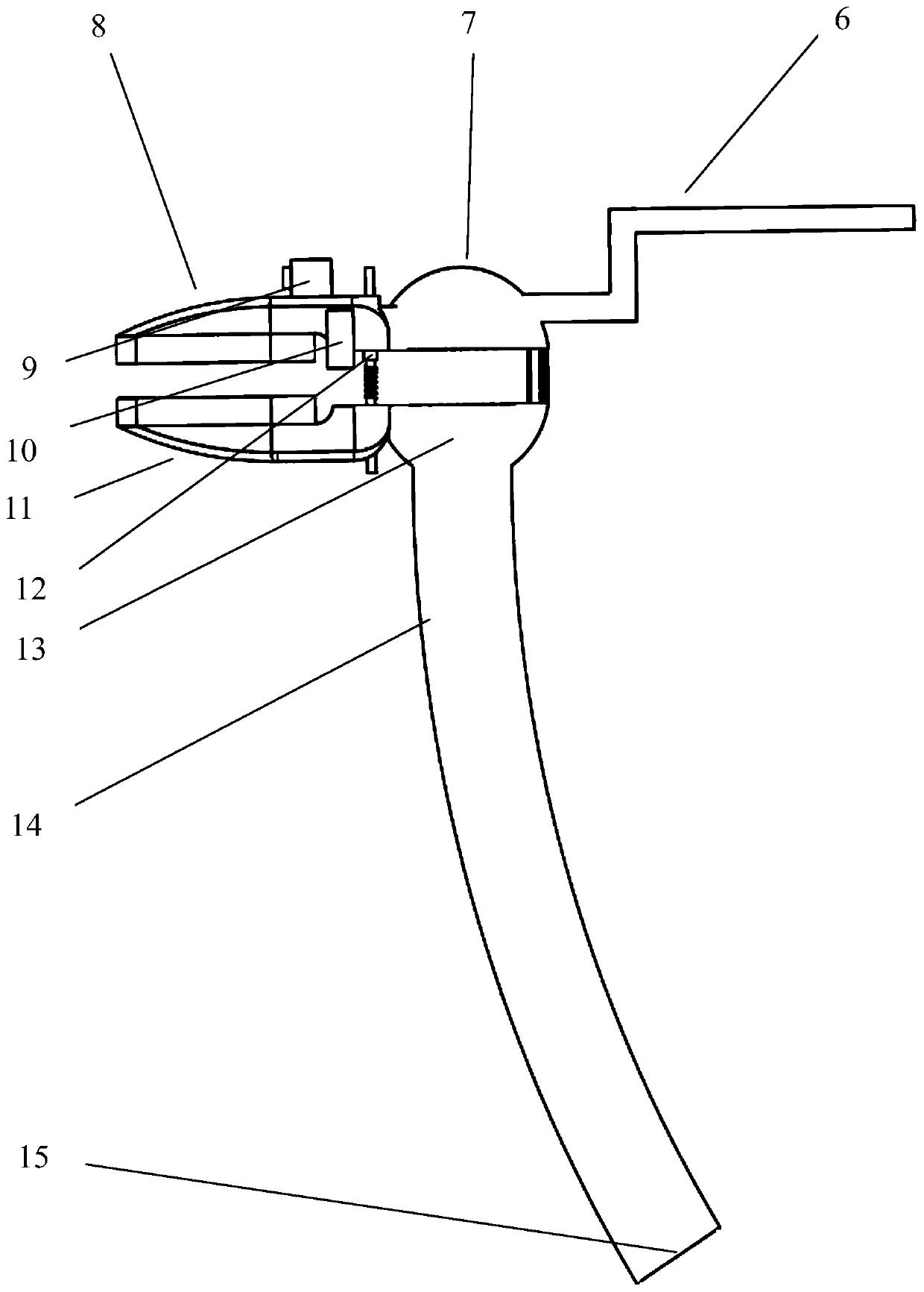
[0042] The bionic snake mouth picking mechanism 2 for visual positioning includes the upper part 3 of the snake mouth, the lower part 4 of the snake mouth and the snake neck 5 . The upper part 3 of the snake mouth includes an upper round cap 7, the upper edge...
Embodiment 2
[0048] Such as Figure 5 As shown, when there are multiple fruits at the fruit position of the image location, when the bionic snake mouth picking mechanism is close to the fruit, since the shape of the snake mouth is conical, using its guidance, the fruit next to the target fruit can follow the outer contour, Move to side position, so just make target fruit be in correct picking position, wherein main picking execution step is identical with embodiment 1.
Embodiment 3
[0050] Such as Figure 6 As shown, when there are many obstructive branches above and below the target fruit, when the bionic snake mouth picking mechanism is close to the fruit, because of the circular slope designed along the outer side of the snake mouth, it can well guide the branches up and down without affecting the picking. Wherein the main picking execution steps are the same as in Example 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More