

Motion state and position cognition method for intelligent mobile robot based on rat brain hippocampus cognition mechanism
A robot motion and robot technology, applied in two-dimensional position/channel control and other directions, can solve the problem of insufficient sensor performance, backward research on cognition and motion status of intelligent mobile robots, and cognitive ability restricting the research and promotion of intelligent mobile robots, etc. problems, to achieve the effect of low hardware and sensor requirements, wide application, good scalability and adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The method will be described in detail below in conjunction with the accompanying drawings and examples.
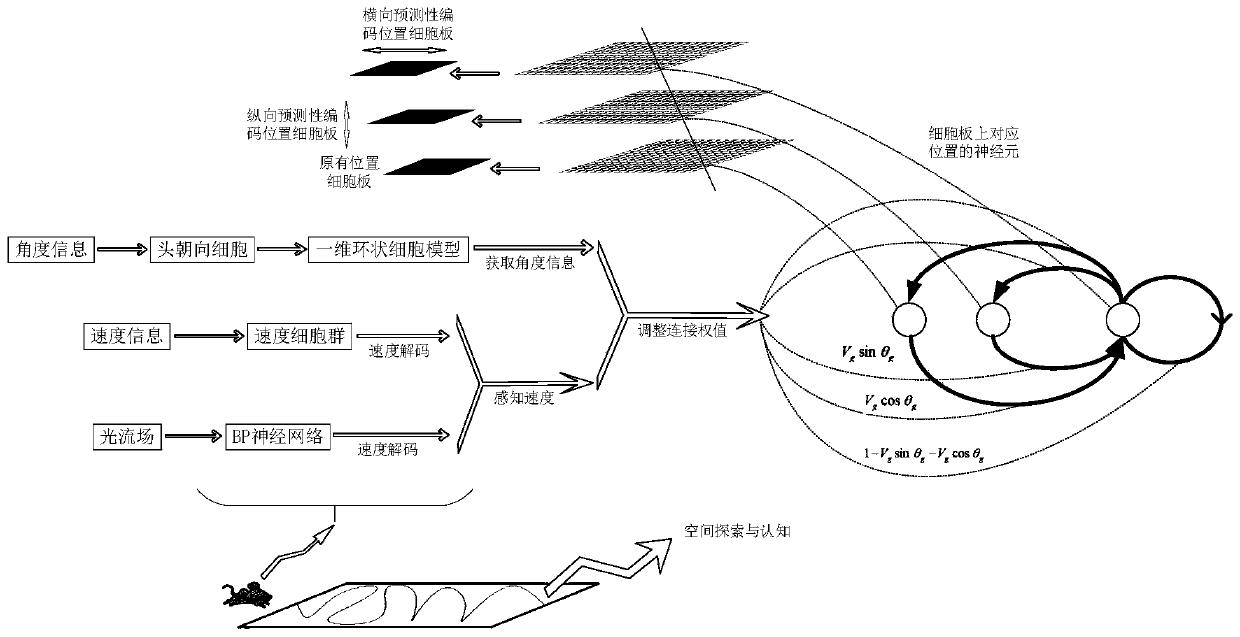
[0043] figure 1 It is an execution flowchart of the motion state and position recognition method of an intelligent mobile robot based on the cognitive mechanism of the hippocampus of the rat brain proposed by the present invention. The method collects the image information of the environment through the camera, collects the angle and direction information of the robot through the gyroscope and the encoder, and transmits the above information to the CPU. The invention proposes a perception speed solution method based on speed cells and visual information to obtain the perception speed of the robot; a one-dimensional ring-connected cell model is used to simulate the discharge mechanism of the head towards the cell, and the angle information obtained by the gyroscope is input into the head towards the cell The model enables the robot to obtain the current angle infor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More