

Operation method and device of cleaning robot
A technology for cleaning robots and operating methods, which is applied in the field of operating methods and devices for cleaning robots, can solve problems such as unproposed solutions, achieve the effect of improving cleaning coverage and avoiding missing uncleaned areas
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
[0067] Embodiment one, Figure 4 is based on Figure 3b Shown is a flow chart of an area division method for a cleaning robot in an embodiment in which a photo of the cleaning robot in its actual environment is captured by an image acquisition device installed on the top of the cleaning robot and the lens is vertically upward, Wherein, the photo is a photo of the lower surface of the horizontal plane above the top of the cleaning robot. like Figure 4 As shown, the specific steps of the method are as follows:
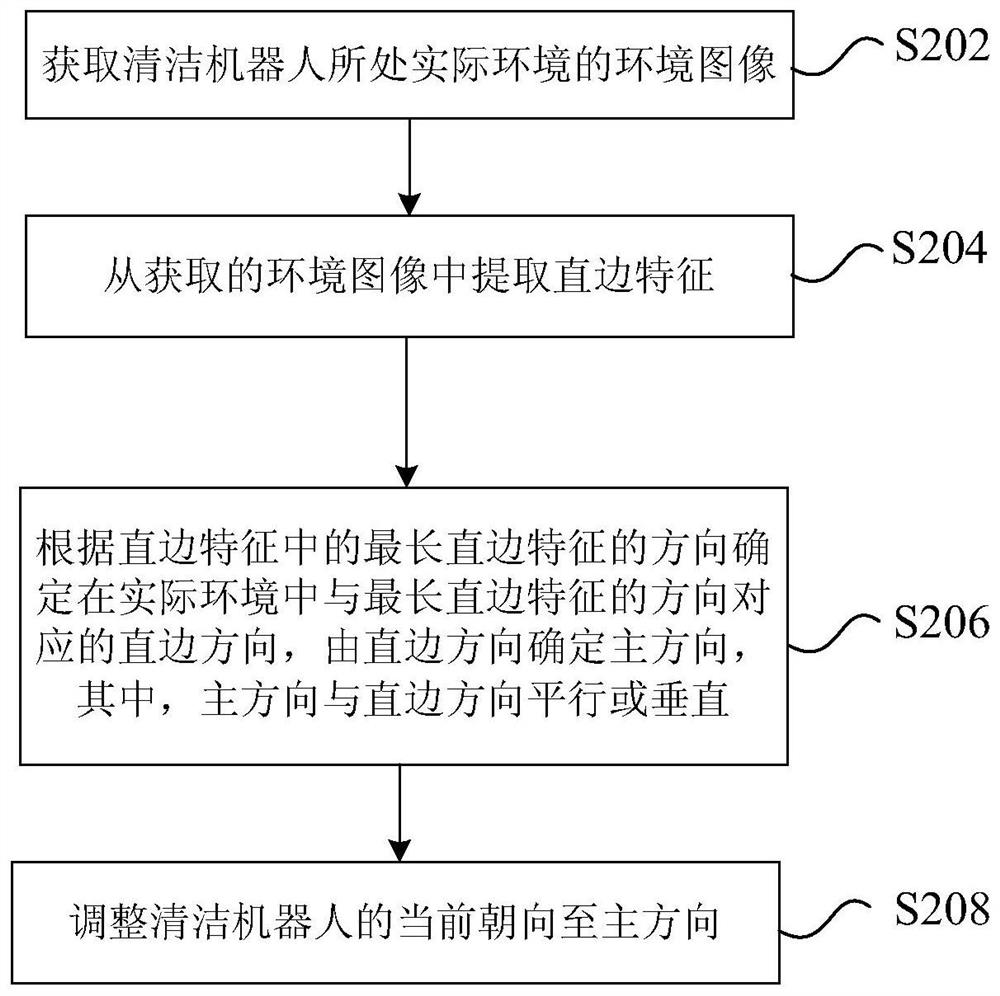
[0068] Step S401: The image acquisition device (such as a video camera or camera) acquires environment images containing information about the environment around the cleaning robot, wherein at least one environment image contains straight-edge features in the environment.
[0069] Step S402: The cleaning robot extracts straight edge features from the environment image.
[0070] Step S403: The cleaning robot calculates the angle between the current orientation of the...
Embodiment approach 2
[0077] Embodiment 2 provides an area division method for a cleaning robot, which specifically includes the following steps:
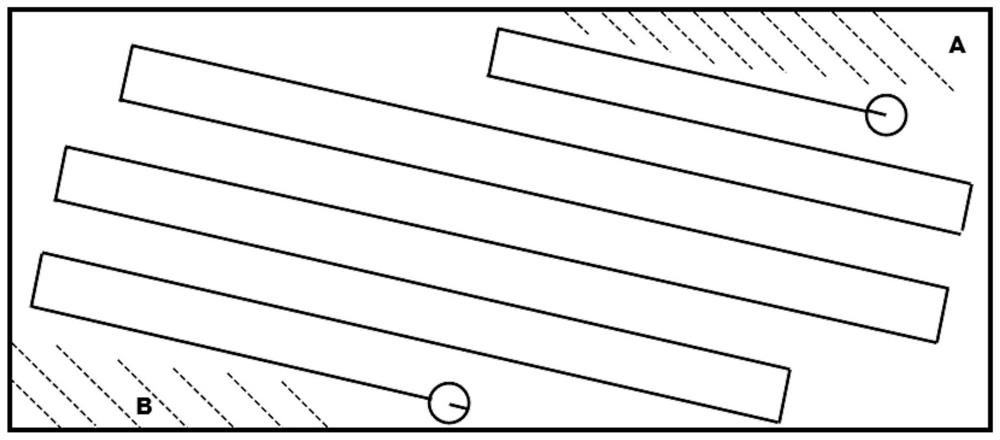
[0078] Step S501: The cleaning robot rotates once on the spot, so that the ranging device (such as TOF or laser radar) obtains the ranging information of the cleaning robot and nearby obstacles around it, and establishes an electronic map (such as Figure 5 shown. Figure 5 is a schematic diagram of the initial environment of the cleaning robot according to one embodiment of the present invention).
[0079] Step S502: The cleaning robot extracts straight edge features from the electronic map, such as Figure 5 For example, the straight edge feature can be the projection line of the side of the wall near the cleaning robot facing the side of the cleaning robot on the ground, and the side of the cabinet or bed near the cleaning robot facing the side of the cleaning robot on the ground Projecting straight lines, etc.
[0080] Step S503: The cleaning rob...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More