

Displacement detection wheel, robot chassis and movable robot
A mobile robot and displacement detection technology, which is applied in the direction of motor vehicles, instruments, manipulators, etc., can solve the problems of driving wheel slipping and inaccurate moving distance of the robot, and achieve the effects of avoiding slipping, guaranteeing wide applicability, and small changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
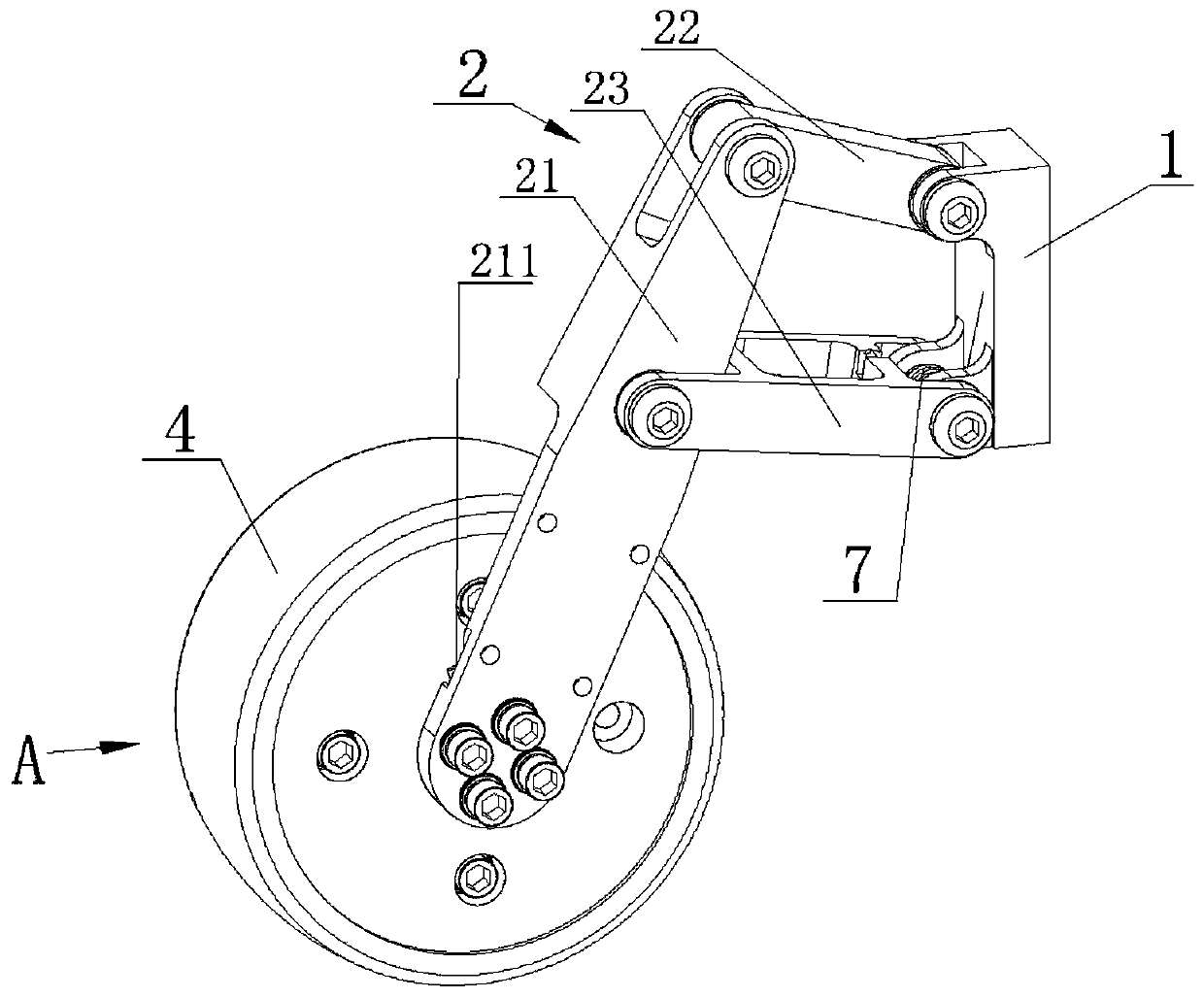
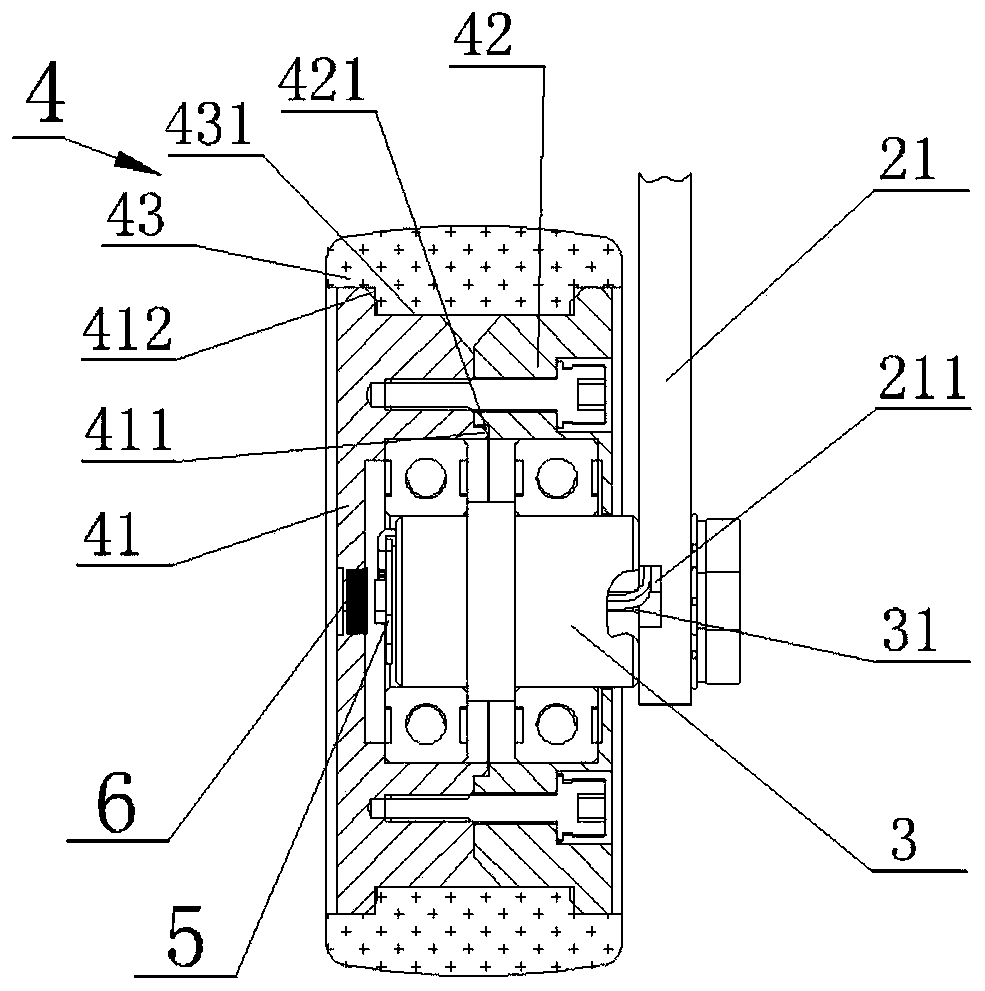
[0028] from figure 1 and figure 2 It can be seen that the displacement detection wheel of the present invention includes a fixed bracket 1, a Hawken linear mechanism 2, an axle 3, a displacement wheel 4, a magnetoelectric encoder 5, a strong magnet 6 and a torsion spring 7,
[0029] The fixed bracket 1 is detachably installed on the chassis of the mobile robot through threaded fasteners,
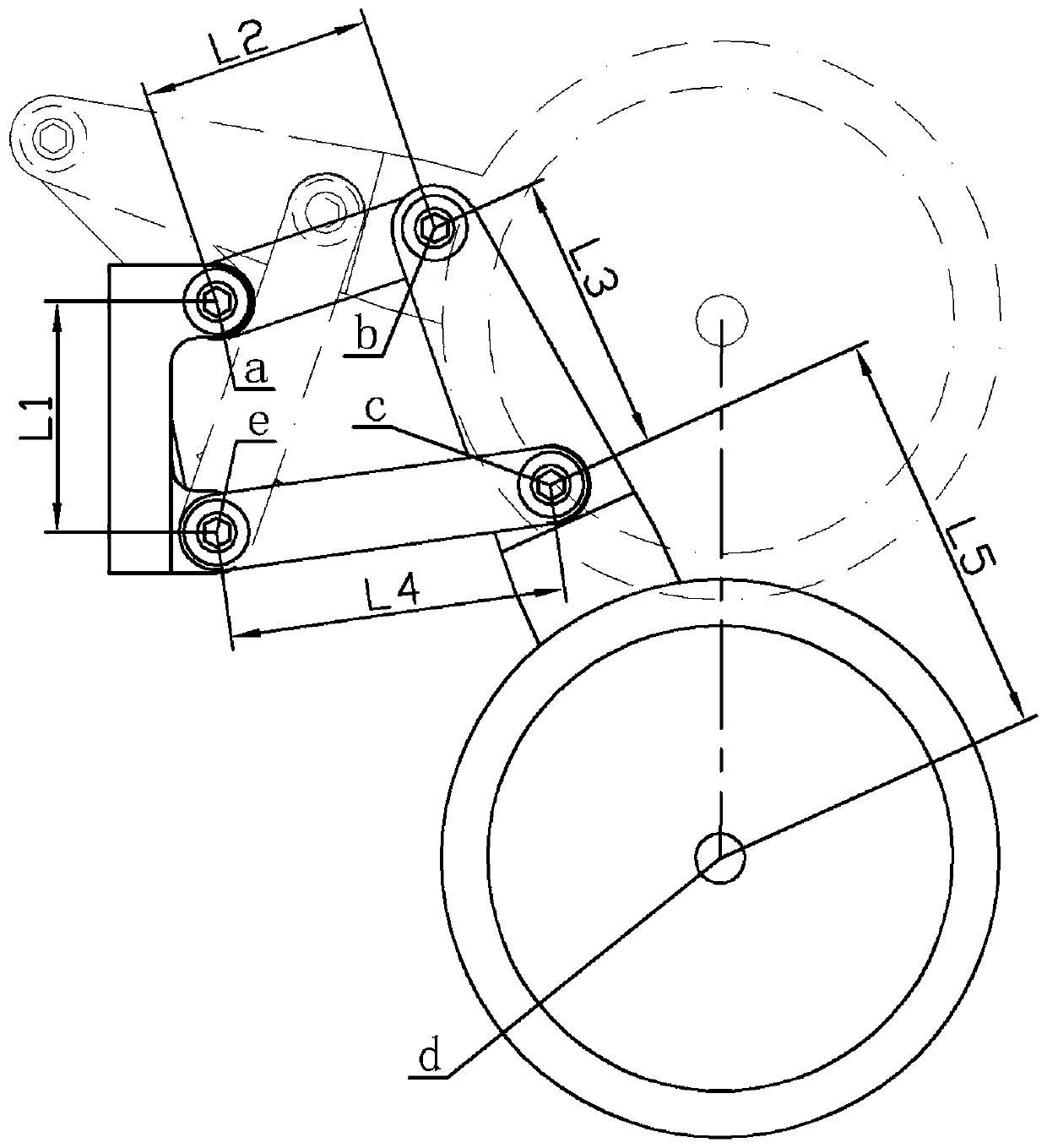
[0030] Hawken linear mechanism 2 includes connecting rod I21, connecting rod II22 and connecting rod III23, connecting rod II22 is hinged between the upper end of connecting rod I21 and the upper end of fixed bracket 1 through a pin shaft, and connecting rod III23 is hinged at the middle of connecting rod I21 through a pin shaft Between the lower end of the fixed bracket 1, the connecting rod III23 is arranged below the connecting rod II22, and the length of the connecting rod III23 is longer than that of the connecting rod II22.
[0031] The wheel shaft 3 adopts a stepped shaft and is ve...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More